07-内点法(不等式约束优化算法)
07-内点法(不等式约束优化算法)
凸优化从入门到放弃完整教程地址:https://www.cnblogs.com/nickchen121/p/14900036.html
一、简介
这篇文章,我们考虑如下带等式约束和不等式约束的凸优化问题:
\(\begin{align} \min \quad & f_0(x) \\ \mathrm{s.t.}\quad & f_i(x) \leq 0 \quad i=1, \cdots, m \\ & Ax = b \end{align} \tag{1}\)
其中, \(f_0, \cdots, f_m: \mathbb{R}^n \mapsto \mathbb{R}\) 是二次可微凸函数, \(A \in \mathbb{R}^{n \times p}, \mathrm{rank}(A) = n \leq p\) 。假设最优解用 \(x^*\) 表示,最优值用 \(f_0(x^*)\) 表示。
我们还假定该问题严格可行,即存在 \(x \in dom(f)\) 满足 $Ax = b $ 和 \(f_i(x) < 0, i =1, \cdots, m\) 。这意味着存在最优对偶 \(\lambda^*, \nu^*\) 满足KKT条件(KKT条件的介绍,参见KKT条件:
\(\begin{align} f_i(x^*) &\leq 0, \quad i = 1, \cdots, m \\ h_i(x^*) &= 0, \quad i = 1, \cdots, p \\ \lambda_i^* &\ge 0, \quad i = 1, \cdots, m \\ \lambda_i^* f_i(x^*) &= 0, \quad i = 1, \cdots, m \\ \nabla f_0(x^*) + \sum_{i=1}^m \lambda_i^* \nabla f_i(x^*) + \sum_{i=1}^{p} \nu_i^* \nabla h_i(x^*) &= 0 \end{align} \tag{2}\)
所以用内点法求解问题(1),就等价于求解问题(2)。显然直接求解(2)是非常困难的,所以我们采用一定的技巧(障碍法),将不等式约束加入到目标函数,从而使问题转化为带等式约束的凸优化问题,从而可以利用无约束凸优化问题求解——Newton Method介绍的办法进行求解。
二、对数障碍
我们重新表述问题(1),将其转化为等式约束问题:
\(\begin{split} \min \quad & f_0(x) + \sum_{i=0}^m I_{-}(f_i(x)) \\ \mathrm{s.t.} \quad & Ax = b \end{split} \tag{3}\)
其中 \(I_{-}: \mathbb{R} \mapsto \mathbb{R}\) 是非正实数的示例函数,
\(I_{-}(x) = \begin{cases} 0 & \textrm{ if} \,\, x \leq 0 \\ \infty & \textrm{otherwise} \end{cases} \\\)
注:这里做这样的转换,是因为如果 \(f_i(x)\) 不成立,则目标函数的解为无穷大,即无解;反之,由于 \(I\_(x)=0\) 不会对原问题的解造成任何影响。
但是可以看到 \(I_{-}(x)\) 是不可微的函数,不能直接应用Newton Method。但是,我们可以近似示例函数:
\(\hat{I_{-}}(x) = \phi(x) =- (1/t) \log(-x), \quad dom(\hat{I_{-}}) = - \mathbb{R}_{++} \\\)
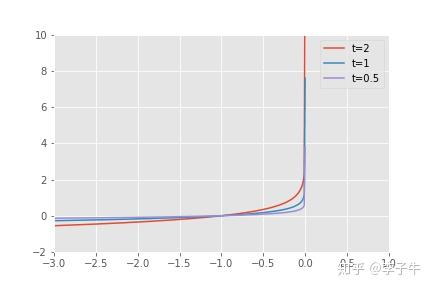 对数障碍函数。t越大,精度越高,越接近示例函数。注:这里有点机器学习中利用 sigimoid 函数替代 sign 函数的味道
对数障碍函数。t越大,精度越高,越接近示例函数。注:这里有点机器学习中利用 sigimoid 函数替代 sign 函数的味道
可以看到上面的近似函数,其是可微的凸函数。下面我们求解如下近似问题,并且我们将给予证明当 \(t \to \infty\) 时,近似问题的解与原问题的解是一样的。
\(\begin{split} \min \quad & f_0(x) + \sum_{i=0}^m -(1/t) \log(-f_i(x)) \\ \mathrm{s.t.} \quad & Ax = b \end{split} \tag{4}\)
为了方便以后讨论,我们定义 \(\phi(x) = -\sum_{i=1}^m \log(-f_i(x))\) 为对数障碍函数 ,并直接给出其梯度和Hessian矩阵。
\(\nabla \phi(x) = \sum_{i=1}^m \frac{1}{-f_i(x)} \nabla f_i(x) \\\)
\(\nabla^2 \phi(x) = \sum_{i=1}^m \frac{1}{-f_i(x)} \nabla^2 f_i(x) + \sum_{i=1}^m \frac{1}{f_i(x)^2} \nabla f_i(x) \nabla f_i(x)^T \\\)
三、中心路径
下面我们考虑如何求解问题(4),为了简化符号表达,对目标函数乘以 \(t\) ,考虑如下等价问题:
\(\begin{split} \min \,\quad &t f_0(x) + \phi(x) \\ \mathrm{s.t.} \,\quad & Ax = b \end{split} \tag{5}\)
对任意的 \(t > 0\) ,上述优化问题存在唯一的最优解 \(x^*(t)\) ,将这一系列最优解组成的集合 \(\{x^*(t)\}\) 称为中心路径。注:前面说到 \(t\) 是不确定的,因此这一系列解就是不同的 \(t\) 对应的最优解,中心路径上的点满足 \(x^*(t)\) 是严格可行的,即:
\(Ax^*(t) = b, \quad f_i(x^*(t))<0, \quad i =1, \cdots, m \\\)
并且存在 \(\hat \nu \in \mathbb{R}^p\) 使得(KKT 条件)
\(\begin{align} 0 &= t \nabla f_0(x^*(t)) + \nabla \phi(x^*(t)) + A^T \hat \nu \\ & = t \nabla f_0(x^*(t)) + \sum_{i=1}^m \frac{1}{-f_i(x^*)} \nabla f_i(x^*) + A^T \hat \nu \end{align} \tag{6}\)
(6)提供了一个重要的性质:每个中心点产生对偶可行解,从而给出最优值 \(p^*\) 的一个下界。更确切地说,定义
\(\lambda^*(t) = - \frac{1}{tf_i(x^*(t))}, \quad i =1, \cdots, m, \quad \nu^*(t) = \hat \nu/t \tag{7}\)
我们要说明 \(\lambda^*(t), \nu^*(t)\) 是原问题(1)的对偶可行解。
首先验证 \(\lambda^*(t) >0\) ,这点由 \(f_i(x^*(t)) < 0\) 保证。其次,我们重新整理(6)(注:公式 (6) 除以 \(t\))得到:
$ \nabla f_0(x^(t)) + \sum_{i=1}^m \lambda^(t) \nabla f_i(x^) + A^T \nu^(t) = 0 \ $注:从这里就可以看出 KKT 条件的影子
因此 \(x^*(t)\) 使得 \(\lambda = \lambda^*(t), \nu = \nu^*(t)\) 时的Lagrange函数
\(L(x,\lambda, \nu) = f_0(x) + \sum_{i=1}^m \lambda_i f_i(x) + \sum_{i=1}^p \nu_i h_i(x) \\\)
达到极小,这意味着 $ \lambda^(t), \nu^(t)$是对偶可行解。因此对偶函数 \(g( \lambda^*(t), \nu^*(t))\) 是有界的:
\(\begin{align} g( \lambda^*(t), \nu^*(t)) &= f_0(x^*(t)) + \sum_{i=1}^m \lambda^*(t) f_i(x^*) + \nu^*(t)^T(Ax^*(t) - b) \\ &= f_0(x^*(t)) - m /t \\ \end{align} \\\)
即,近似解 \(g( \lambda^*(t), \nu^*(t))\) 与原问题最优解 \(p^*\) 之间的间隙就是 $m/t $ 。随着 \(t \to \infty\) , \(m/t \to 0\) 。
\(g( \lambda^*(t), \nu^*(t)) \leq p^* \Rightarrow f_0(x^*(t)) -p^* \leq m/t \\\)
注:上述就是通过对可行解的分析,得出近似解和原问题的最优解的差值
这里,我们补充给出基于KKT条件的解释。
我们可以将中心路径条件(6)解释为KKT最优性(2)的变形。
点 \(x\) 是等于 \(x^*(t)\) 的充要条件是存在 \(\lambda, \nu\) 满足
\(\begin{align} Ax = b, \quad f_i(x) &\leq 0, \quad i=1, \cdots, m \\ \lambda_i &\ge 0, \quad i=1, \cdots, m \\ \nabla f_0(x) + \sum_{i=1}^m\lambda_i f_i(x) + A^T\nu &= 0 \\ -\lambda_i f_i(x) &=1/t, \quad i=1, \cdots, m \end{align} \tag{8}\)
近似问题的KKT条件(8)与原始KKT条件(2)的唯一的差别是 \(-\lambda_i f_i(x) =0\) 被 \(-\lambda_i f_i(x) =1/t\) 替代注:这里来自于我们对公式 (6) 的处理。特别地,当 \(t\) 很大时, \(x^*(t)\) 和对应的对偶解 \(\lambda^*(t), \nu^*(t)\) "几乎"满足原始问题(1)的KKT条件。
这里小结一下。我们在中心路径这部分给出了证明近似问题(5)的最优解与原始问题(1)的最优解的误差不超过 \(m/t\) ,因此我们可以放心的求解近似问题(5)。
四、障碍方法
下面给出Newton Method求解近似问题(5)的算法框架
重复进行:
- 中心点步骤:从初始值 \(x\) 开始,采用Newton Method在 \(Ax=b\) 的约束下极小化 \(tf_0 + \phi\) ,最终确定 \(x^*(t)\)
- 改进: \(x:= x^*(t)\)
- 停止准则。 如果 \(m/t < \epsilon\) 则退出
- 增加 \(t\) : \(t:= \mu t, \quad \mu>1\)
根据在中心路径小节中的分析,近似问题(5)的最优解与原始问题(1)的最优解的误差不超过 \(m/t\),所以在求解时,我们从较小的 \(t\) 开始,不断增大 \(t\) 直至收敛。此外,我们把每次求出的最优解 \(x^*(t)\) 当作下一个 \(t:= \mu t\) 的初值,这样Newton Method会收敛更快,即Step1.中心点步骤的运行时间可以当作常数对待,而不是一个耗时的迭代循环。
五、总结
在这篇文章里,我们介绍了带等式约束和不等式约束的凸优化问题。通过引入对数障碍函数,我们把原问题近似为带等式约束的凸优化问题,从而可以应用Newton Method求解KKT最优条件,找到最优解;此外,我们也给出了近似问题的最优解和原问题的最优解之间的误差,证明当 \(t\) 不断增大时,精度会不断提高。
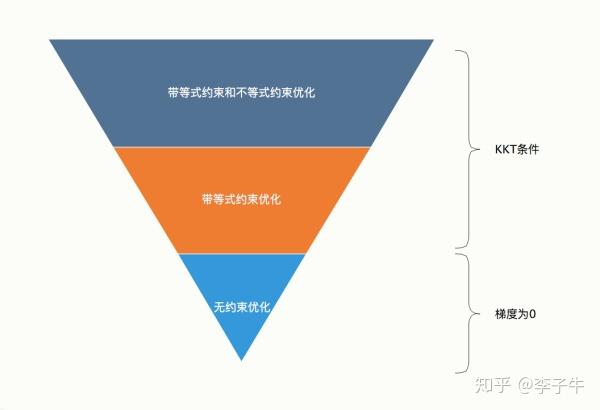
到这里,整体凸优化系列已经全部讲完了。对于最简单的无约束凸优化问题,我们可以采用Gradient Descent或者Newton Method求解;对于稍复杂的等式约束凸优化问题,我们对目标函数进行二阶Taylor近似,然后采用Newton Method求解KKT最优条件;对于最复杂的带不等式约束问题,则时引入对数障碍函数,转化为带等式约束的凸优化问题。
参考文献:Stephen Boyd, Lieven Vandenberghe: Convex Optimization

 浙公网安备 33010602011771号
浙公网安备 33010602011771号