【洛谷P1126】机器人搬重物
是搜索play的第四弹!
机器人搬重物
题目描述
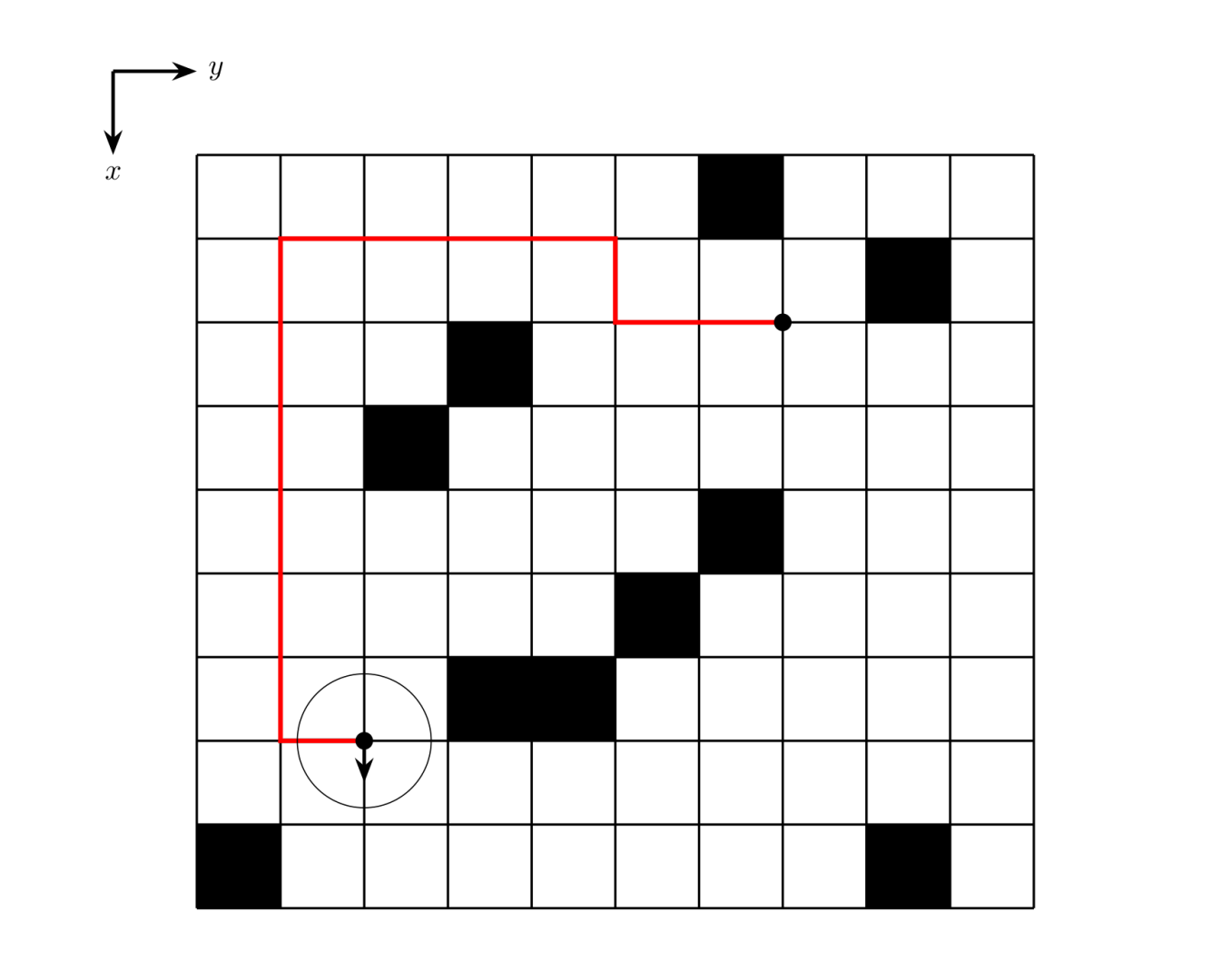
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径
- 向前移动
Creep); - 向前移动
Walk); - 向前移动
Run); - 向左转(
Left); - 向右转(
Right)。
每个指令所需要的时间为
输入格式
第一行为两个正整数
输出格式
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出
样例 #1
样例输入 #1
9 10
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 0
0 0 0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 1 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 1 0
7 2 2 7 S
样例输出 #1
12
解法&&个人感想
这题是少有的一遍过的绿题吧 果然搜索的绿题比较好做?
几个坑点:
1.机器人是有直径的 所以对于一个格子要把周围的四个格点都标记成不能走
2.需要看样例发现左右上下都要缩小一个单位
3.vis代表走到x,y时朝向dir的vis
4.在循环三步时 如果不能走直接break 如果只是走过可以瞬移
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 | #include<bits/stdc++.h>#define ll long longusing namespace std;char di;int n,m,sx,sy,sdir,fx,fy;int ma[55][55];//ma跑的是格点 注意我们只要将所谓的格子转化成格点就可以int vis[55][55][5];struct node{ int x,y,dir,t;};queue<node>q;int dx[7]={0,-1,0,1,0,0,0},dy[7]={0,0,1,0,-1,0,0};bool check(int x,int y){ if(x>=1&&x<=n-1&&y>=1&&y<=m-1&&!ma[x][y]) return true; else return false;}//现在要养成check函数的好习惯int main(){ scanf("%d%d",&n,&m); for(int i=1;i<=n;i++){ for(int j=1;j<=m;j++){ scanf("%d",&ma[i][j]); if(ma[i][j]==1){ ma[i-1][j]=1; ma[i][j-1]=1; ma[i-1][j-1]=1; }//打标记 } } scanf("%d %d %d %d ",&sx,&sy,&fx,&fy); cin>>di; if(di=='N') sdir=1; if(di=='E') sdir=2; if(di=='S') sdir=3; if(di=='W') sdir=4;//判断方向 q.push(node{sx,sy,sdir,0}); vis[sx][sy][sdir]=1; while(!q.empty()){ int ax=q.front().x,ay=q.front().y,adir=q.front().dir,at=q.front().t; q.pop(); if(ax==fx&&ay==fy){ printf("%d",at); system("pause"); return 0; } int tx=ax,ty=ay; for(int i=1;i<=3;i++){ tx+=dx[adir],ty+=dy[adir]; if(!check(tx,ty)) break; if(vis[tx][ty][adir]) continue; vis[tx][ty][adir]=1; q.push(node{tx,ty,adir,at+1}); }//循环三步走 int tdir=adir; tdir--; if(tdir==0) tdir=4; if(check(ax,ay)&&!vis[ax][ay][tdir]){ vis[ax][ay][tdir]=1; q.push(node{ax,ay,tdir,at+1}); } int kdir=adir; kdir++; if(kdir==5) kdir=1; if(check(ax,ay)&&!vis[ax][ay][kdir]){ vis[ax][ay][kdir]=1; q.push(node{ax,ay,kdir,at+1}); }//转向 } cout<<-1; system("pause"); return 0;} |



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 单线程的Redis速度为什么快?
· SQL Server 2025 AI相关能力初探
· AI编程工具终极对决:字节Trae VS Cursor,谁才是开发者新宠?
· 展开说说关于C#中ORM框架的用法!