Games 101: 旋转矩阵
旋转矩阵
本文主要介绍了旋转矩阵的推导,分为两种方式:
- 旋转坐标
- 旋转坐标轴
以下坐标系都是右手坐标系
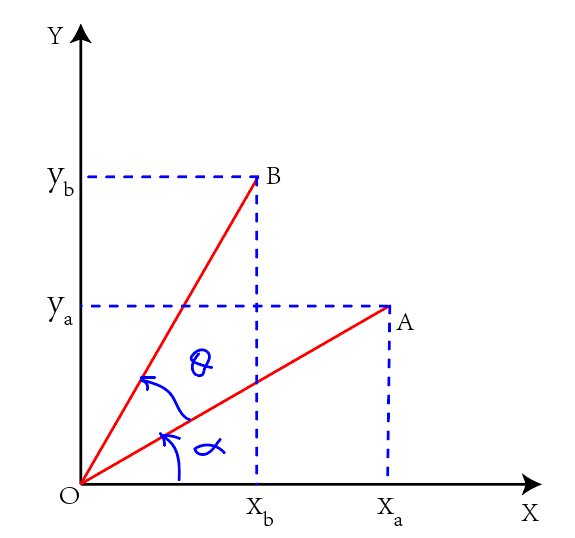
旋转坐标
已知坐标点\(A(x_a,y_a)\), 旋转\(\theta\)角后变为坐标点\(B(x_b,y_b)\),求解旋转矩阵.
\[{\large
\begin{align*}
\begin{split}
x_a &=r_a \cdot cos(\alpha) =r_b \cdot cos(\alpha) \\
y_a &=r_a \cdot sin(\alpha) =r_b \cdot sin(\alpha) \\
x_b &=r_b \cdot cos(\alpha+\theta) \\
&=r_b \cdot cos(\alpha) \cdot cos(\theta)-r_b \cdot sin(\alpha) \cdot sin(\theta) \\
&=x_a \cdot cos(\theta) - y_a \cdot sin(\theta) \\
y_b &=r_b \cdot sin(\alpha+\theta) \\
&=r_b \cdot cos(\alpha) \cdot sin(\theta)+r_b \cdot sin(\alpha) \cdot cos(\theta) \\
&=x_a \cdot sin(\theta) + y_a \cdot cos(\theta)
\end{split}
\end{align*}
}
\]
即:
\[{\large
\begin{align*}
\begin{split}
\begin{bmatrix}
x_b \\
y_b \\
\end{bmatrix} =\begin{bmatrix}
cos(\theta) & -sin(\theta) \\
sin(\theta) & cos(\theta)
\end{bmatrix} \cdot \begin{bmatrix}
x_a \\
y_a \\
\end{bmatrix}
\end{split}
\end{align*}
}
\]
推广到三维以及其他轴,可以得到三维坐标点的旋转矩阵为:
\[{\large
\begin{align*}
\begin{split}
R_x(\alpha)=
\begin{bmatrix}
1 & 0 & 0 \\
0 & cos(\alpha) & -sin(\alpha) \\
0 & sin(\alpha) & cos(\alpha) \\
\end{bmatrix} \qquad
R_y(\beta)=
\begin{bmatrix}
cos(\beta) & 0 & sin(\beta)\\
0 & 1 & 0 \\
-sin(\beta) & 0 & cos(\beta) \\
\end{bmatrix} \qquad
R_z(\theta)=
\begin{bmatrix}
cos(\theta) & -sin(\theta) & 0 \\
sin(\theta) & cos(\theta) & 0 \\
0 & 0 & 1
\end{bmatrix}
\end{split}
\end{align*}
}
\]
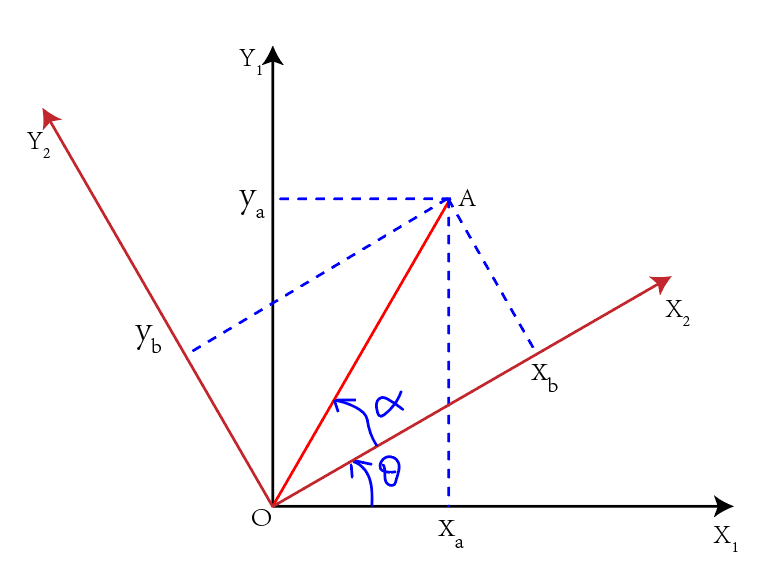
旋转坐标
坐标轴\(OX_1Y_1\)绕z轴旋转\(\theta\)角后变为坐标轴\(OX_2Y_2\),点A在坐标轴\(OX_1Y_1\)中坐标为\((x_a,y_a)\), 在坐标轴\(OX_2Y_2\)中\((x_b,y_b)\),求解旋转矩阵.
坐标轴\(OX_1Y_1\),两个方向的单位向量为\(\vec{x_1},\vec{y_1}\),坐标轴\(OX_2Y_2\),两个方向的单位向量为\(\vec{x_2},\vec{y_2}\)
分解单位向量:
\[{\large
\begin{align*}
\begin{split}
\vec{x_1} &=\left | \vec{x_1} \right | \cdot cos(\theta) \cdot \vec{x_2} - \left | \vec{x_1} \right | \cdot sin(\theta) \cdot \vec{y_2} = cos(\theta) \cdot \vec{x_2} - sin(\theta) \cdot \vec{y_2} \\
\vec{y_1} &=\left | \vec{y_1} \right | \cdot sin(\theta) \cdot \vec{x_2} + \left | \vec{x_1} \right | \cdot cos(\theta) \cdot \vec{y_2} = sin(\theta) \cdot \vec{x_2} + cos(\theta) \cdot \vec{y_2}
\end{split}
\end{align*}
}
\]
向量变换:
\[{\large
\begin{align*}
\begin{split}
\vec{r_a} &=
x_a \cdot \vec{x_1} + y_a \cdot \vec{y_1} \\
&= x_a \cdot ( cos(\theta) \cdot \vec{x_2} - sin(\theta) \cdot \vec{y_2}) + y_a \cdot ( sin(\theta) \cdot \vec{x_2} + cos(\theta) \cdot \vec{y_2})\\
&=(x_a \cdot cos(\theta) +y_a \cdot sin(\theta)) \cdot \vec{x_2} +(-sin(\theta) \cdot x_a + cos(\theta) \cdot y_a)\cdot \vec{y_2} \\
\vec{r_a} &= x_b \cdot \vec{x_2} + y_b \cdot \vec{y_2}
\end{split}
\end{align*}
}
\]
即
\[{\large
\begin{align*}
\begin{split}
\begin{bmatrix}
x_b \\
y_b
\end{bmatrix} =\begin{bmatrix}
cos(\theta) & sin(\theta)\\
-sin(\theta) & cos(\theta)
\end{bmatrix} \cdot
\begin{bmatrix}
x_a \\
y_a
\end{bmatrix}
\end{split}
\end{align*}
}
\]
推广到三维以及其他轴,可以得到三维坐标轴的旋转矩阵为:
\[{\large
\begin{align*}
\begin{split}
R_x(\alpha)=
\begin{bmatrix}
1 & 0 & 0 \\
0 & cos(\alpha) & sin(\alpha) \\
0 & -sin(\alpha) & cos(\alpha) \\
\end{bmatrix} \qquad
R_y(\beta)=
\begin{bmatrix}
cos(\beta) & 0 & -sin(\beta)\\
0 & 1 & 0 \\
sin(\beta) & 0 & cos(\beta) \\
\end{bmatrix} \qquad
R_z(\theta)=
\begin{bmatrix}
cos(\theta) & sin(\theta) & 0 \\
-sin(\theta) & cos(\theta) & 0 \\
0 & 0 & 1
\end{bmatrix}
\end{split}
\end{align*}
}
\]
本文来自博客园,作者:木子七维,转载请注明原文链接:https://www.cnblogs.com/naiveDevil/p/18161918

 浙公网安备 33010602011771号
浙公网安备 33010602011771号