15_事件标志组
事件标志组
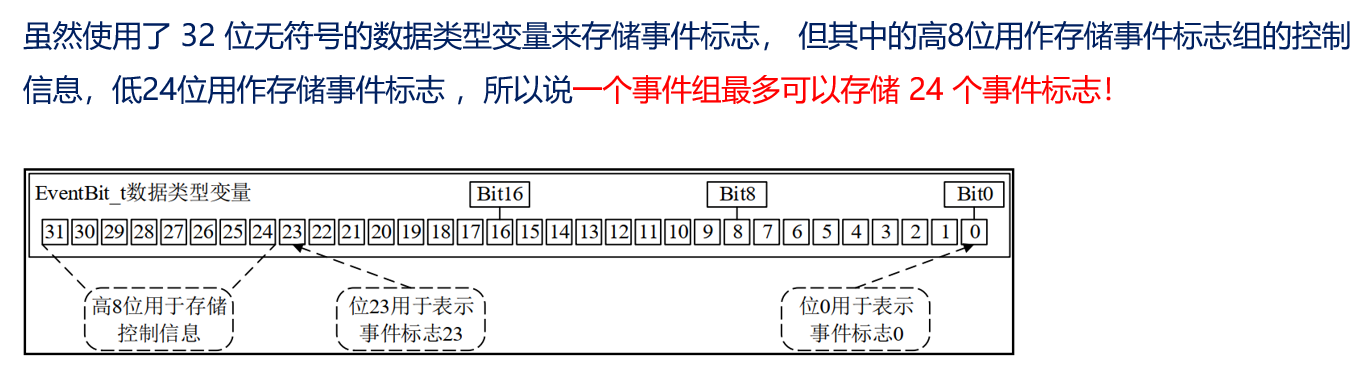
事件标志组简介
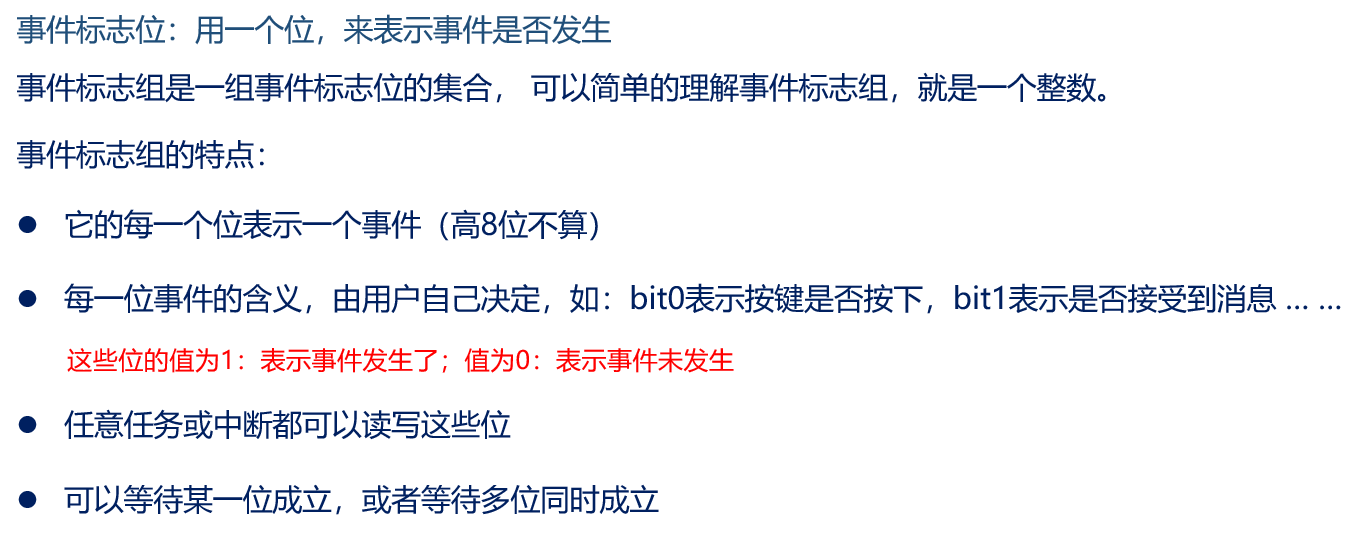

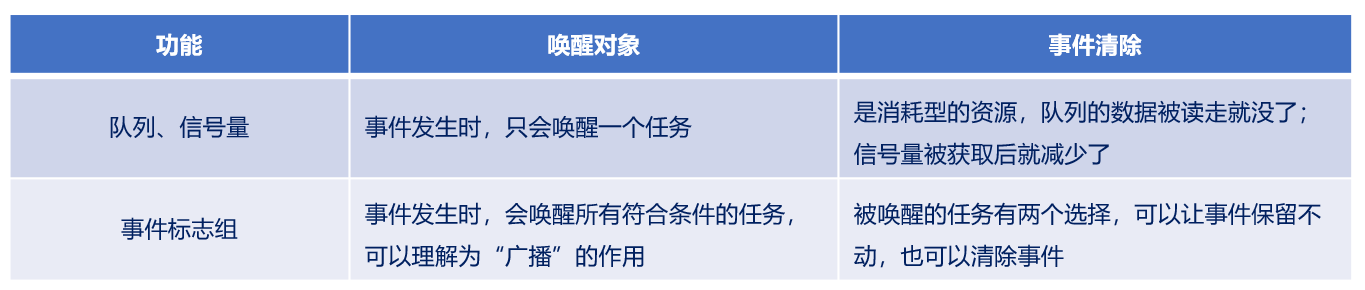
事件标志组与队列、信号量的区别?
事件标志组相关API函数介绍

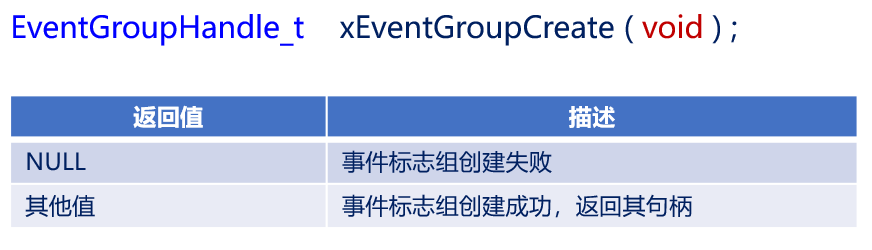
动态方式创建事件标志组API函数
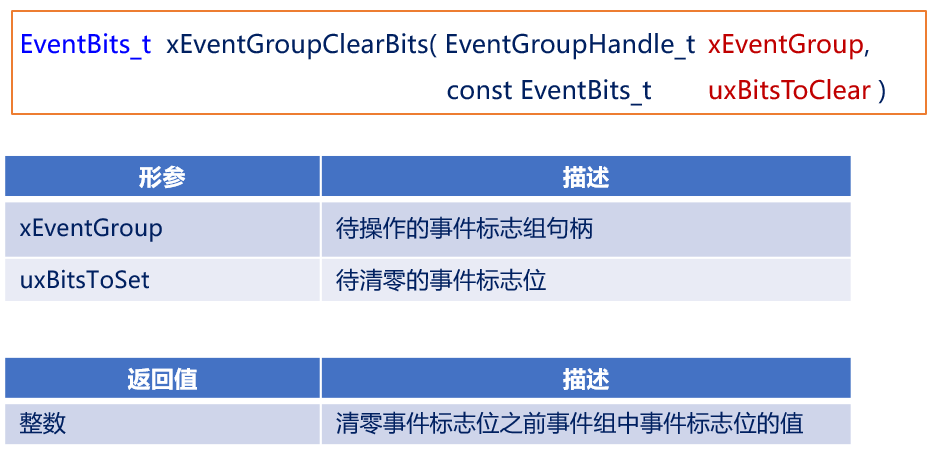
清除事件标志位API函数
设置事件标志位API函数

等待事件标志位API函数

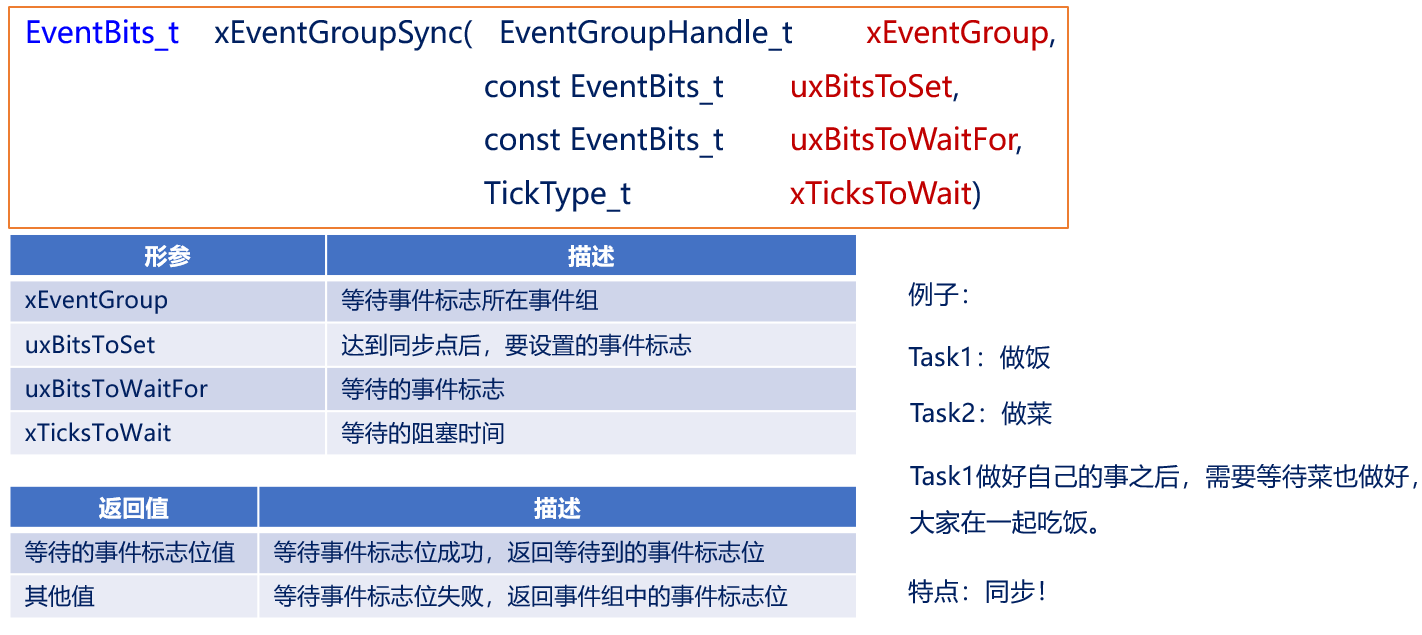
同步函数
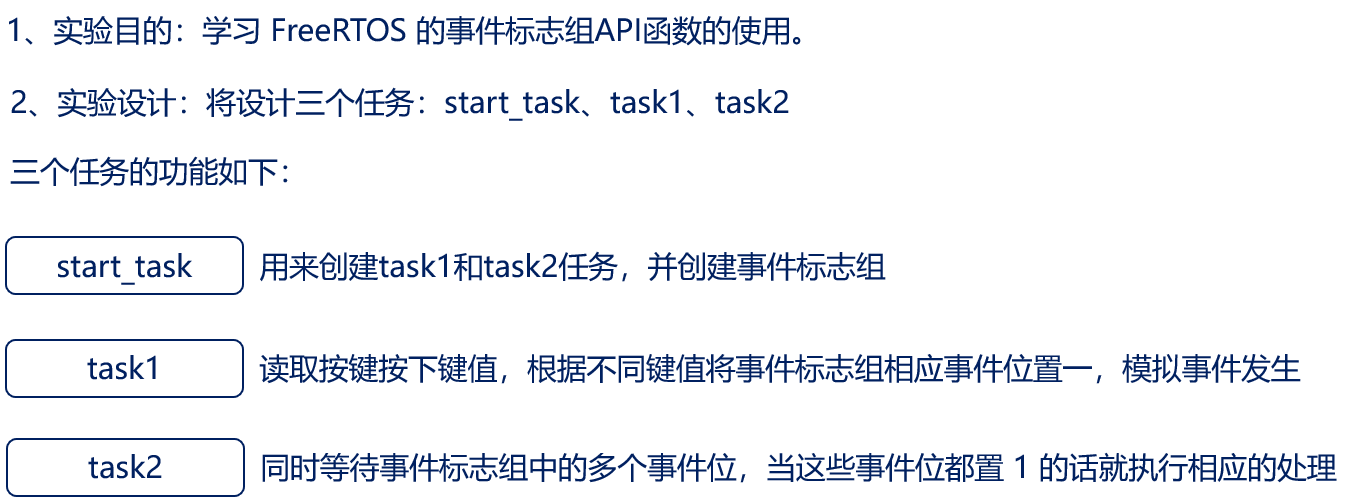
事件标志组实验
代码
freertos_demo.c
/**
****************************************************************************************************
* @file freertos.c
* @author 正点原子团队(ALIENTEK)
* @version V1.4
* @date 2022-01-04
* @brief FreeRTOS 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "./SYSTEM/delay/delay.h"
#include "./MALLOC/malloc.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
#include "event_groups.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_STACK_SIZE 128
#define START_TASK_PRIO 1
TaskHandle_t start_task_handler;
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
EventGroupHandle_t event_group_handle;
#define EVENT_BIT0 (1 << 0)
#define EVENT_BIT1 (1 << 1)
void start_task( void * pvParameters );
void task1( void * pvParameters )
{
uint8_t key;
while(1)
{
key = key_scan(0);
if(key == KEY0_PRES)
{
xEventGroupSetBits(event_group_handle, EVENT_BIT0); //设置事件标志组bit0为1
}else if(key == KEY1_PRES)
{
xEventGroupSetBits(event_group_handle, EVENT_BIT1); //设置事件标志组bit1为1
}
vTaskDelay(10);
}
}
void task2( void * pvParameters )
{
EventBits_t event_bit;
while(1)
{
event_bit = xEventGroupWaitBits(event_group_handle, /* 事件标志组句柄 */
EVENT_BIT0 | EVENT_BIT1, /* 等待事件标志组的bit0和bit1位 */
pdTRUE, /* 成功等待到事件标志位后,清除事件标志组中的bit0和bit1位 */
pdTRUE, /* 等待事件标志组的bit0和bit1位都置1,就成立 */
portMAX_DELAY); /* 死等 */
printf("等待到的事件标志位值为:%#x\r\n",event_bit);
}
}
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate(start_task, "start_task", START_TASK_STACK_SIZE, NULL, START_TASK_PRIO, &start_task_handler);
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); //进入临界区
event_group_handle = xEventGroupCreate(); //创建事件标志组
if(event_group_handle != NULL)
{
printf("事件标志组创建成功!!!\r\n");
}
xTaskCreate(task1, "task1", TASK1_STACK_SIZE, NULL, TASK1_PRIO, &task1_handler);
xTaskCreate(task2, "task2", TASK2_STACK_SIZE, NULL, TASK2_PRIO, &task2_handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL(); //退出临界区
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号