04_FreeRTOS的任务挂起与恢复
FreeRTOS的任务挂起与恢复
任务的挂起与恢复的API函数
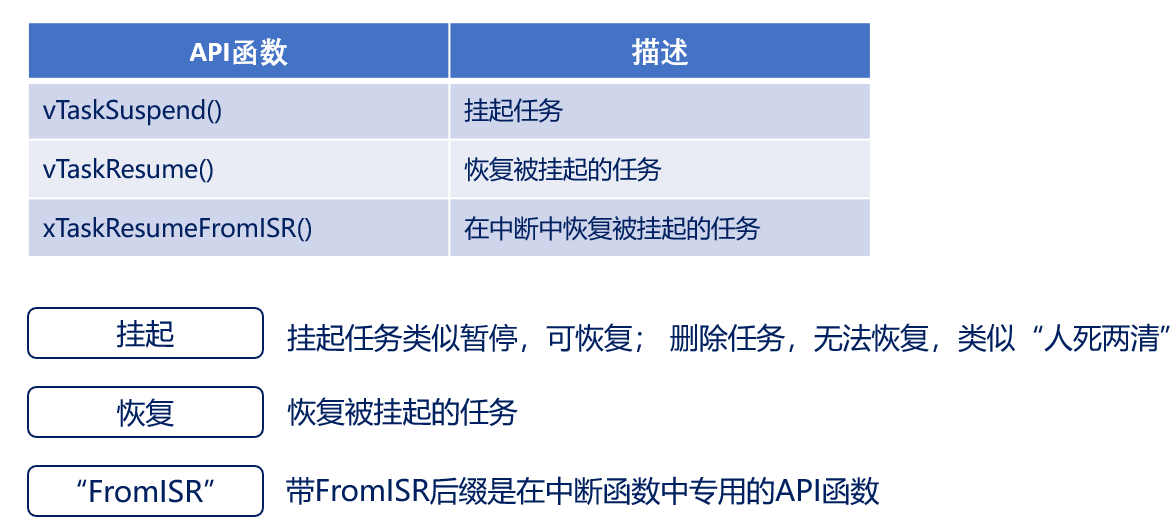
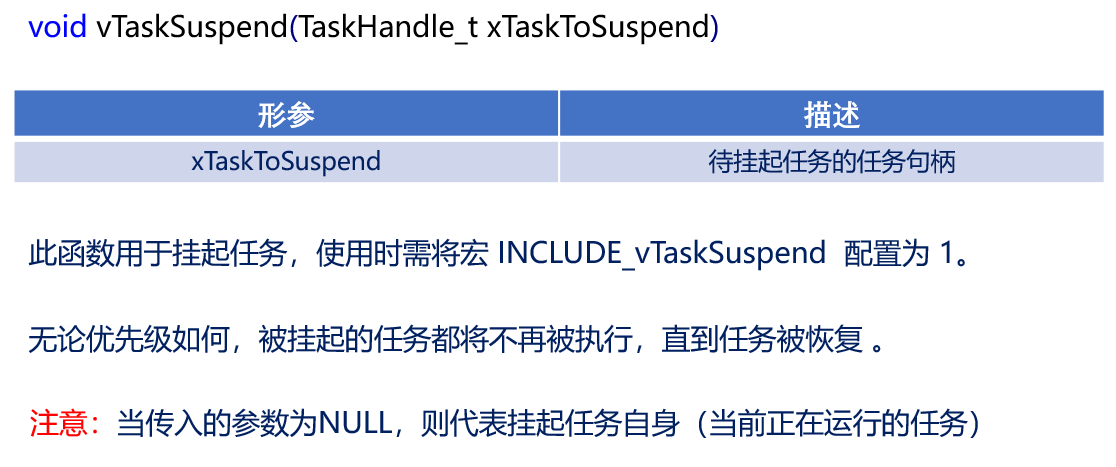
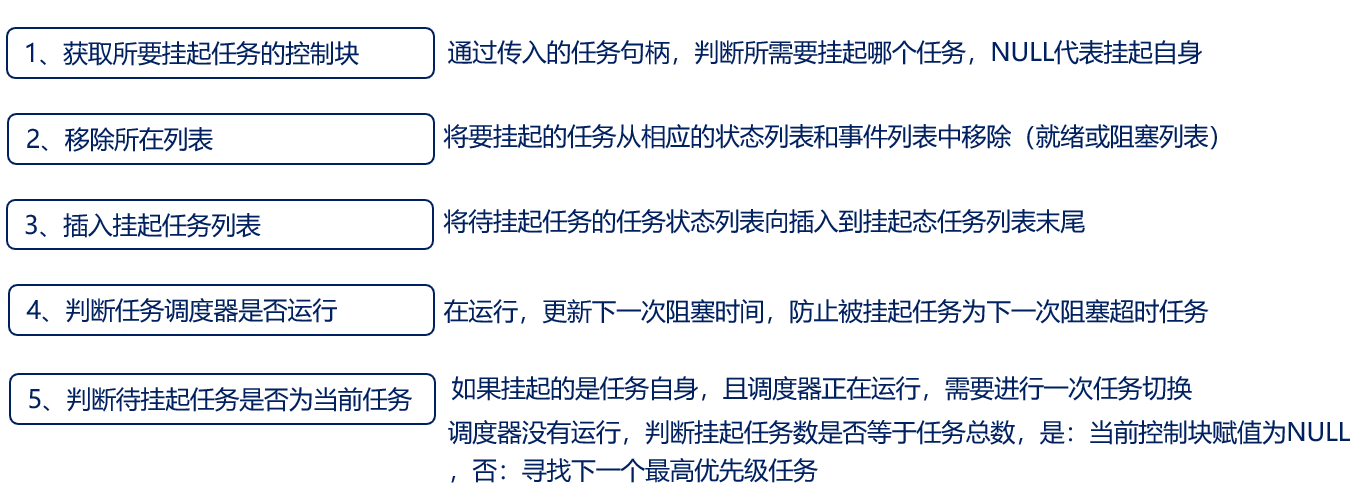
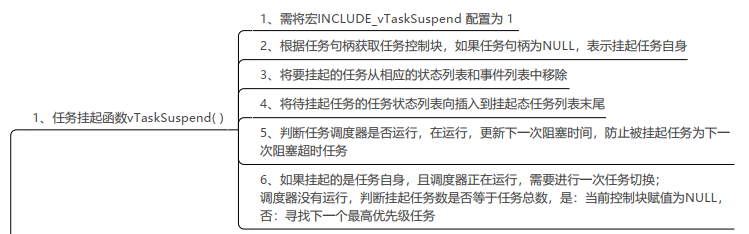
任务挂起函数介绍
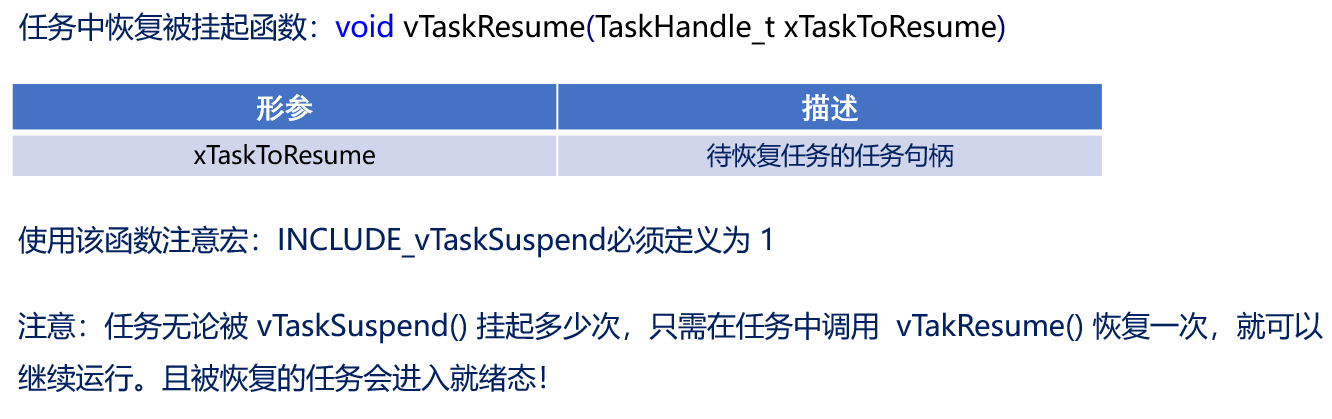
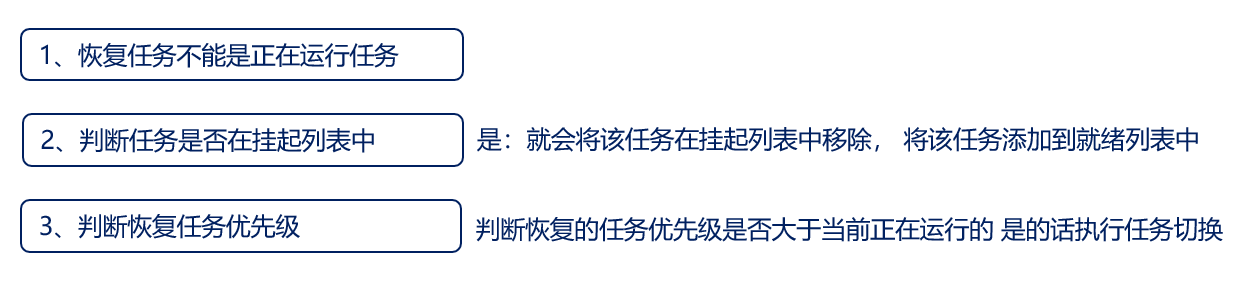
任务恢复函数介绍
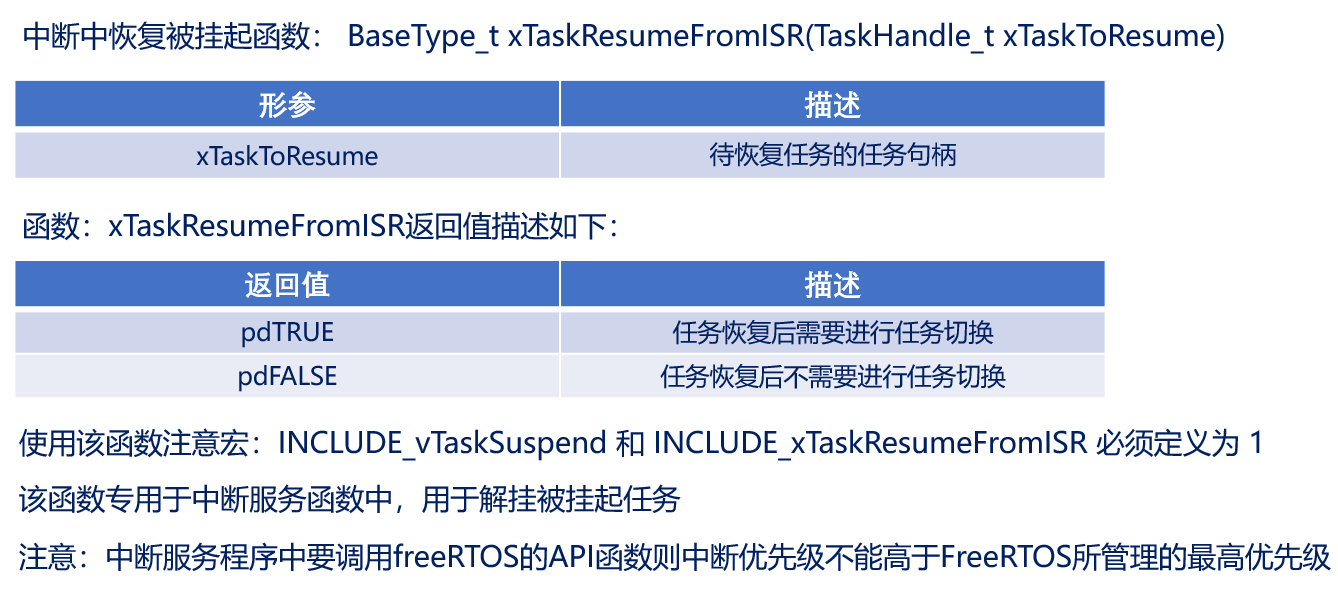
任务优先级:数值越大,优先级越高
中断优先级:数值越小,优先级越高
使用中断任务恢复时要确保在启动 RTOS 之前调用
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );所有优先级位都指定为抢占优先级位。
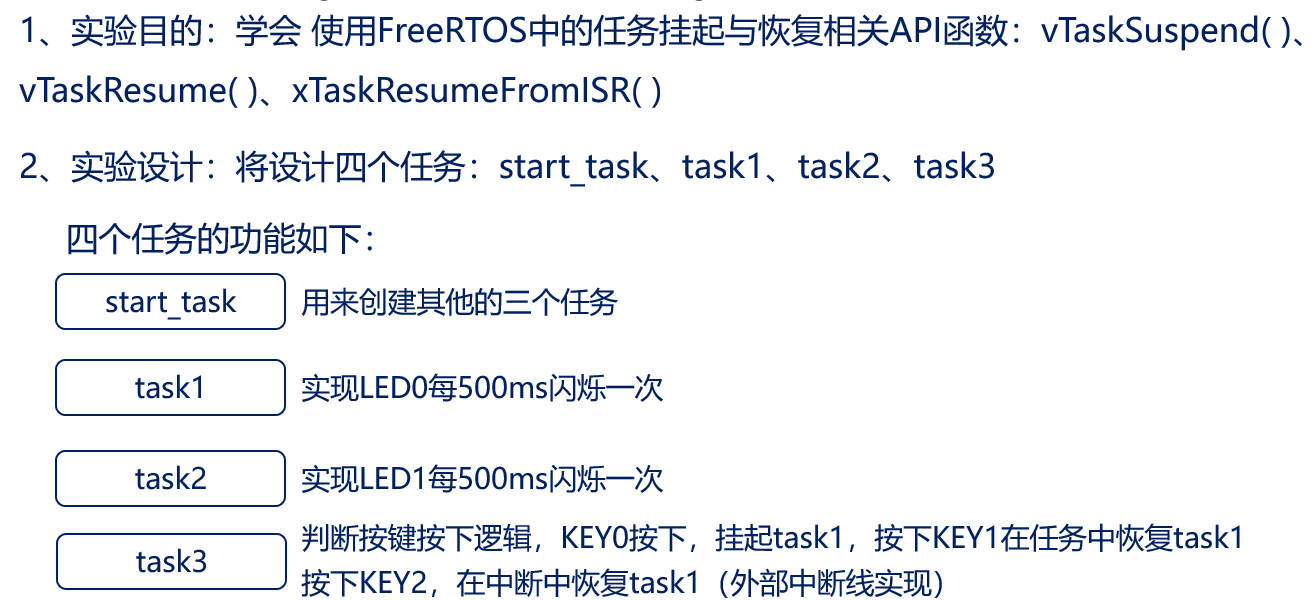
任务挂起与恢复实验
任务挂起函数内部实现
任务恢复函数内部实现
代码
freertos_demo.c
/**
****************************************************************************************************
* @file freertos.c
* @author 正点原子团队(ALIENTEK)
* @version V1.4
* @date 2022-01-04
* @brief FreeRTOS 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_STACK_SIZE 128
#define START_TASK_PRIO 1
TaskHandle_t start_task_handler;
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
#define TASK3_STACK_SIZE 128
#define TASK3_PRIO 4
TaskHandle_t task3_handler;
void start_task( void * pvParameters );
void task1( void * pvParameters )
{
uint32_t task1_num = 0;
while(1)
{
printf("task1_num:%d!!!\r\n", ++task1_num);
LED0_TOGGLE();
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
uint32_t task2_num = 0;
while(1)
{
printf("task2_num:%d!!!\r\n", ++task2_num);
LED1_TOGGLE();
vTaskDelay(500);
}
}
/*
* 按键0:任务1挂起
* 按键1:任务1恢复
*/
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
key=key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler!=NULL)
{
vTaskSuspend(task1_handler);
printf("挂起task1\r\n");
}
}
else if(key == KEY1_PRES)
{
vTaskResume(task1_handler);
printf("在任务中恢复task1\r\n");
}
vTaskDelay(10);
}
}
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate(start_task, "start_task", START_TASK_STACK_SIZE, NULL, START_TASK_PRIO, &start_task_handler);
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); //进入临界区
xTaskCreate(task1, "task1", TASK1_STACK_SIZE, NULL, TASK1_PRIO, &task1_handler);
xTaskCreate(task2, "task2", TASK2_STACK_SIZE, NULL, TASK2_PRIO, &task2_handler);
xTaskCreate(task3, "task3", TASK3_STACK_SIZE, NULL, TASK3_PRIO, &task3_handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL(); //退出临界区
}
exti.c
/**
****************************************************************************************************
* @file exti.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-14
* @brief 外部中断 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者 F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211014
* 第一次发布
*
****************************************************************************************************
*/
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/EXTI/exti.h"
#include "FreeRTOS.h"
#include "task.h"
extern TaskHandle_t task1_handler;
/**
* @brief KEY2 外部中断服务程序
* @param 无
* @retval 无
*/
void KEY2_INT_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(KEY2_INT_GPIO_PIN); /* 调用中断处理公用函数 清除KEY2所在中断线 的中断标志位,中断下半部在HAL_GPIO_EXTI_Callback执行 */
__HAL_GPIO_EXTI_CLEAR_IT(KEY2_INT_GPIO_PIN); /* HAL库默认先清中断再处理回调,退出时再清一次中断,避免按键抖动误触发 */
}
/**
* @brief WK_UP 外部中断服务程序
* @param 无
* @retval 无
*/
void WKUP_INT_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(WKUP_INT_GPIO_PIN); /* 调用中断处理公用函数 清除KEY_UP所在中断线 的中断标志位,中断下半部在HAL_GPIO_EXTI_Callback执行 */
__HAL_GPIO_EXTI_CLEAR_IT(WKUP_INT_GPIO_PIN); /* HAL库默认先清中断再处理回调,退出时再清一次中断,避免按键抖动误触发 */
}
/**
* @brief 中断服务程序中需要做的事情
* 在HAL库中所有的外部中断服务函数都会调用此函数
* @param GPIO_Pin:中断引脚号
* @retval 无
*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
delay_ms(20); /* 消抖 */
switch(GPIO_Pin)
{
BaseType_t xYieldRequired;
case KEY2_INT_GPIO_PIN:
if (KEY2 == 0)
{
xYieldRequired = xTaskResumeFromISR(task1_handler);
printf("在中断中恢复task1\r\n");
if(xYieldRequired == pdTRUE)
{
portYIELD_FROM_ISR( xYieldRequired );
}
}
break;
default : break;
}
}
/**
* @brief 外部中断初始化程序
* @param 无
* @retval 无
*/
void extix_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
key_init();
gpio_init_struct.Pin = KEY2_INT_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_IT_FALLING; /* 下降沿触发 */
gpio_init_struct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(KEY2_INT_GPIO_PORT, &gpio_init_struct); /* KEY2配置为下降沿触发中断 */
HAL_NVIC_SetPriority(KEY2_INT_IRQn, 5, 0); /* 抢占5,子优先级0 */
HAL_NVIC_EnableIRQ(KEY2_INT_IRQn); /* 使能中断线2 */
}
函数解析



 浙公网安备 33010602011771号
浙公网安备 33010602011771号