03_FreeRTOS的任务创建和删除
FreeRTOS的任务创建和删除
任务创建和删除的API函数
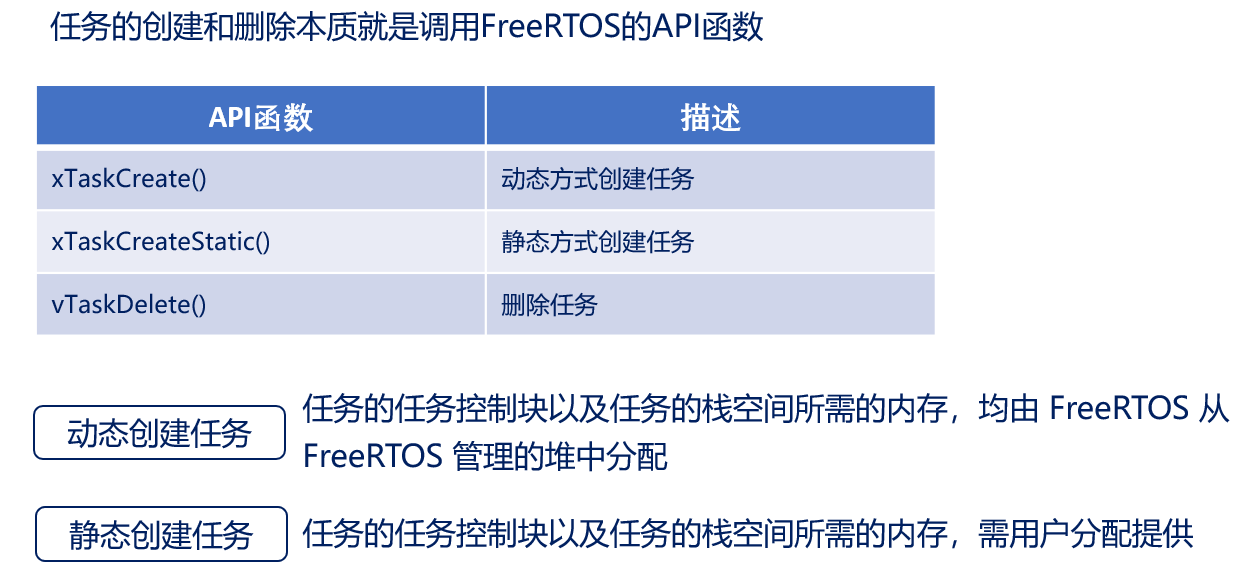
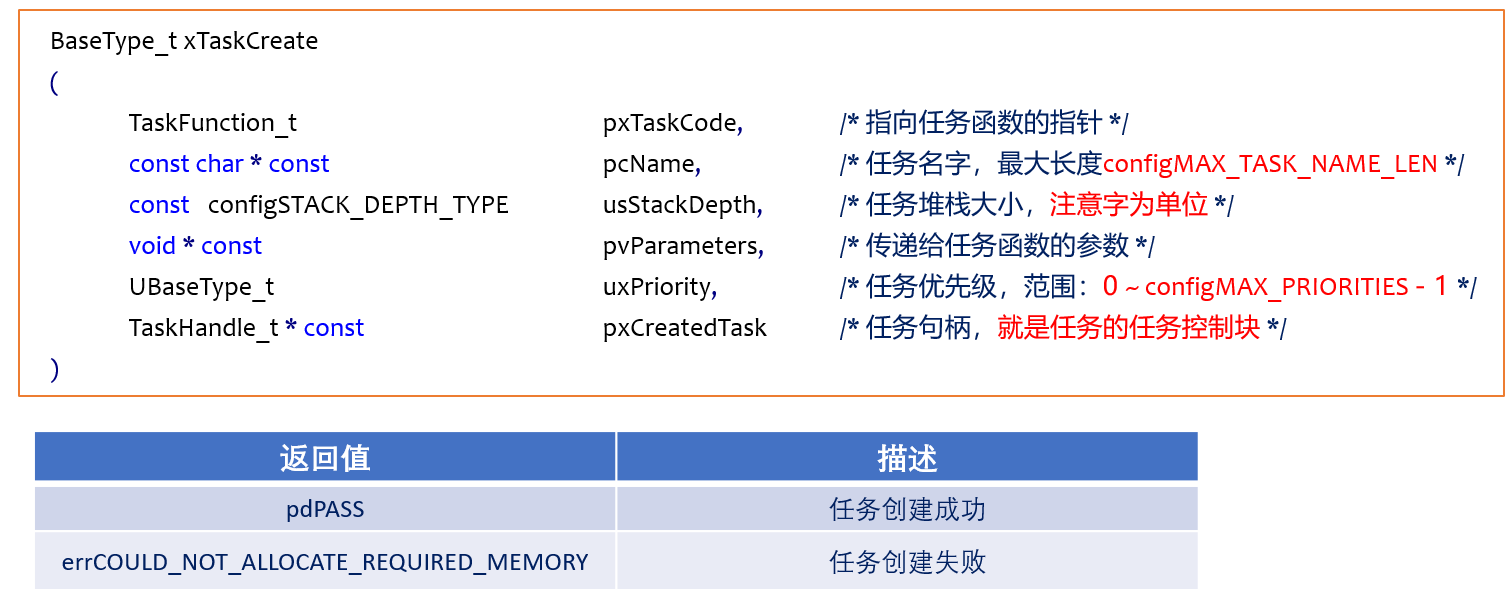
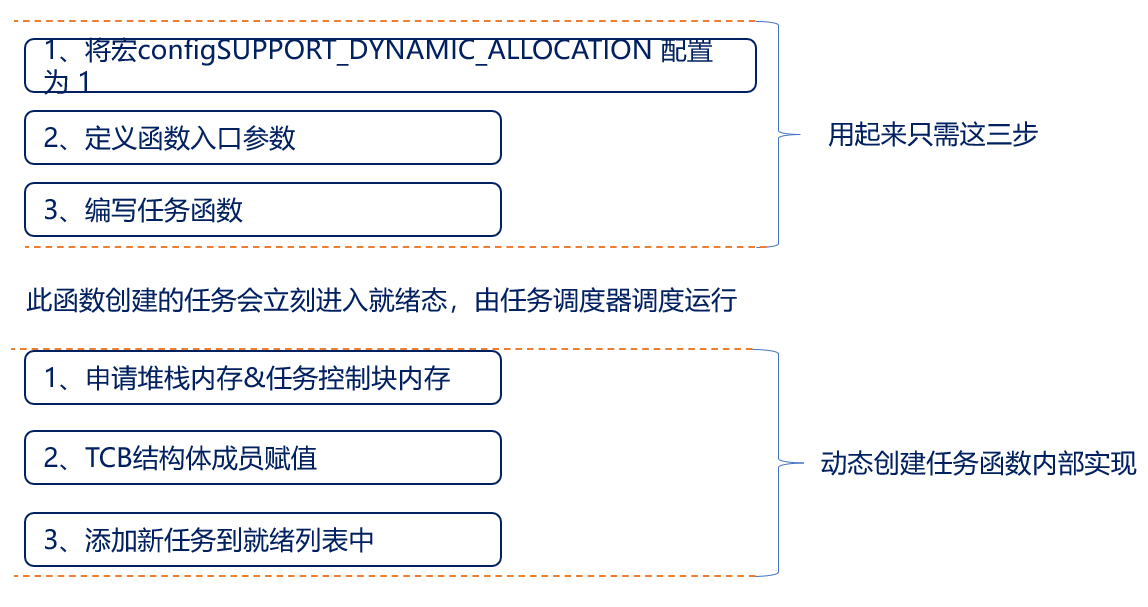
动态创建任务函数
实现动态创建任务流程
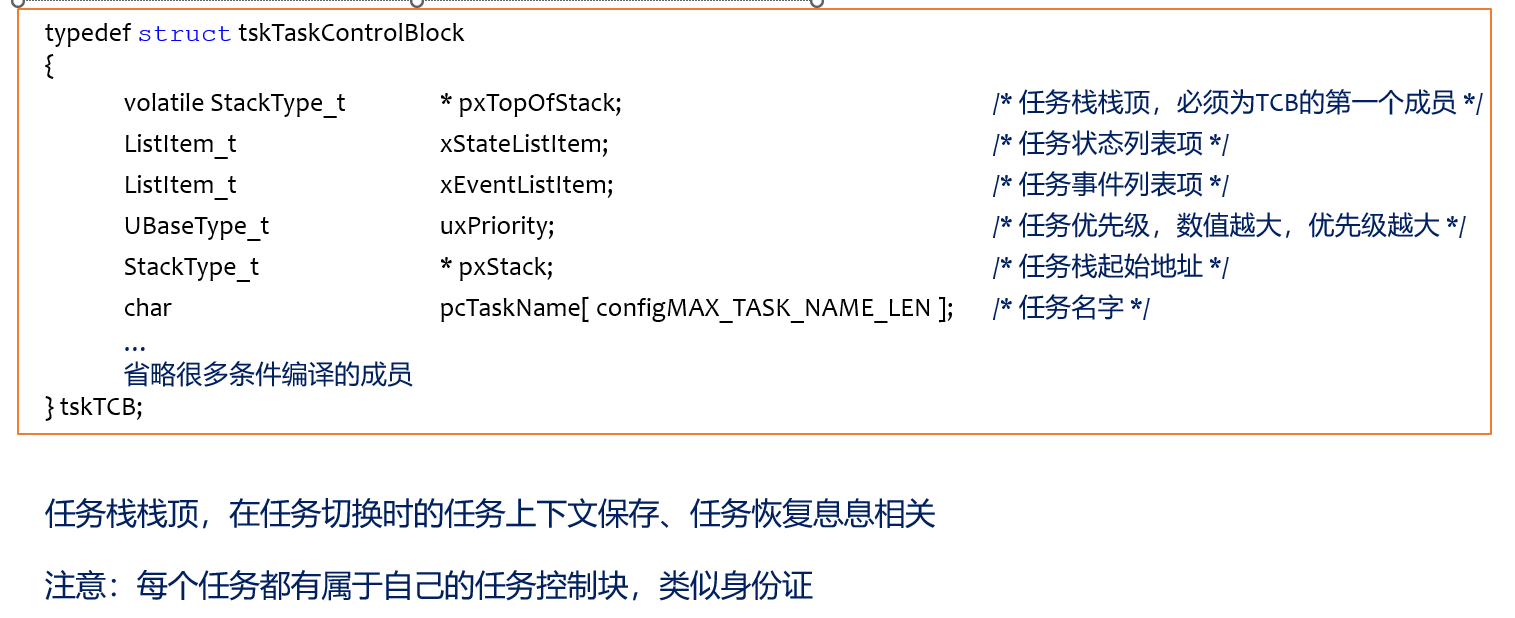
任务控制块结构体成员介绍
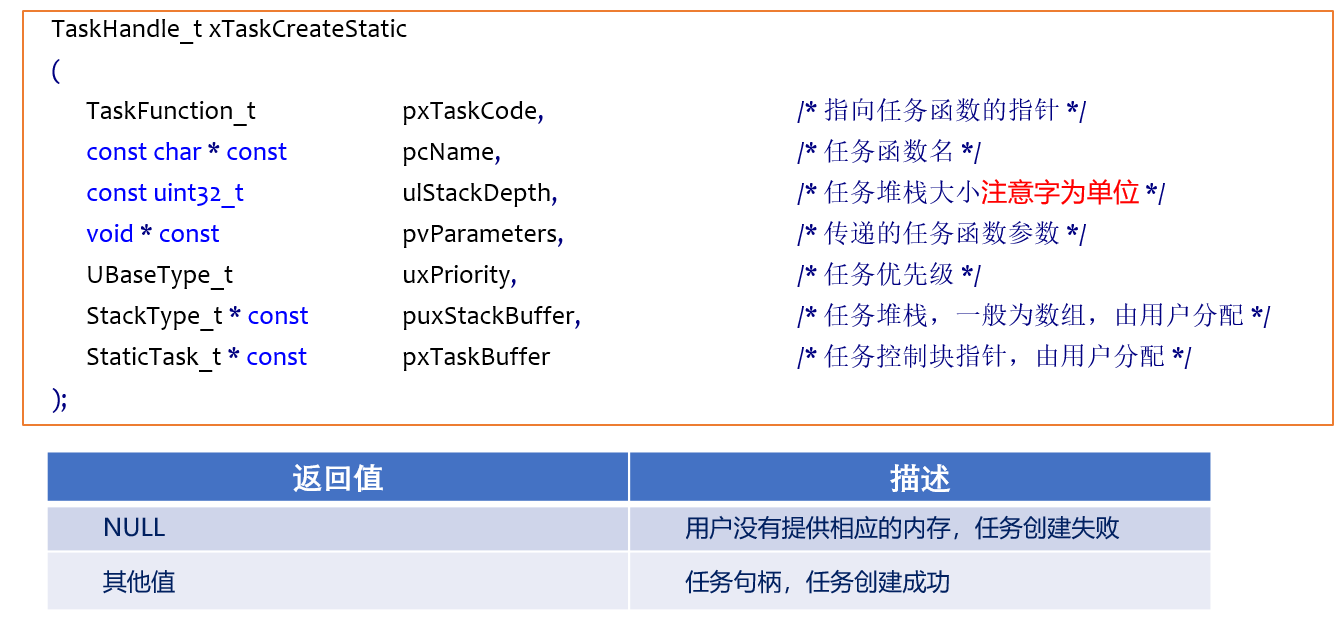
静态创建任务函数
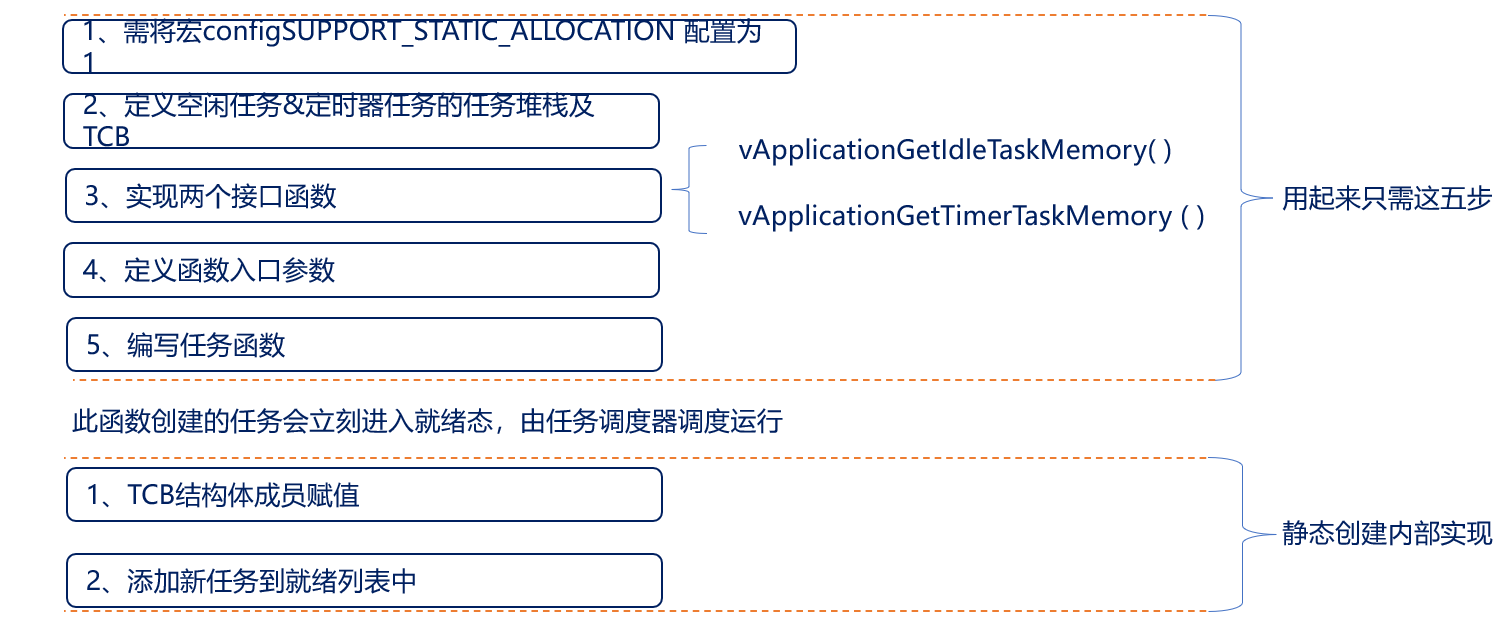
静态创建任务使用流程
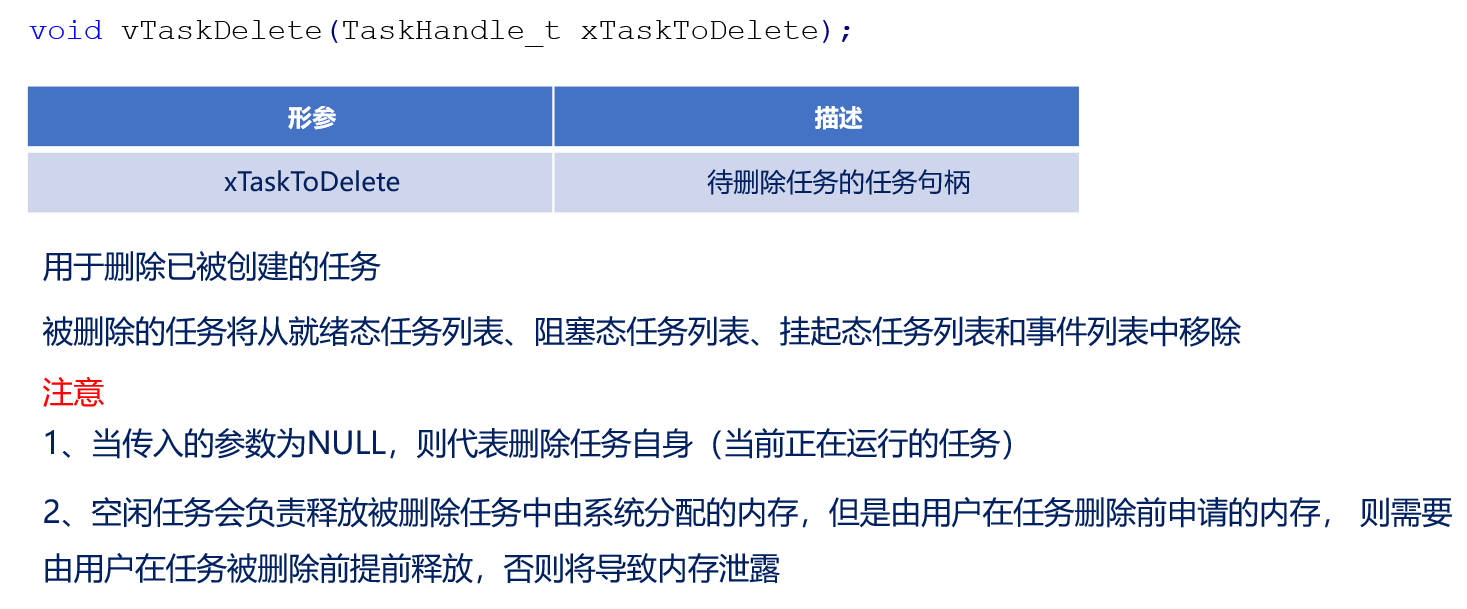
任务删除函数
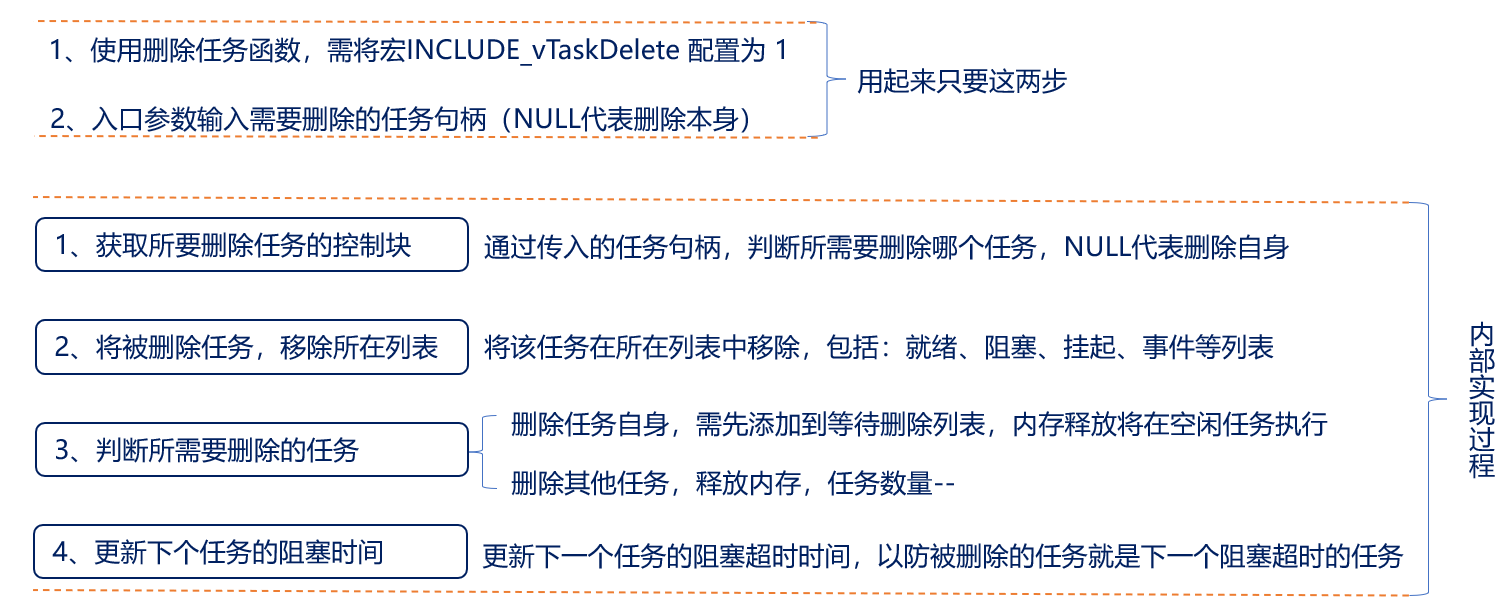
删除任务流程
任务创建和删除(动态方法)
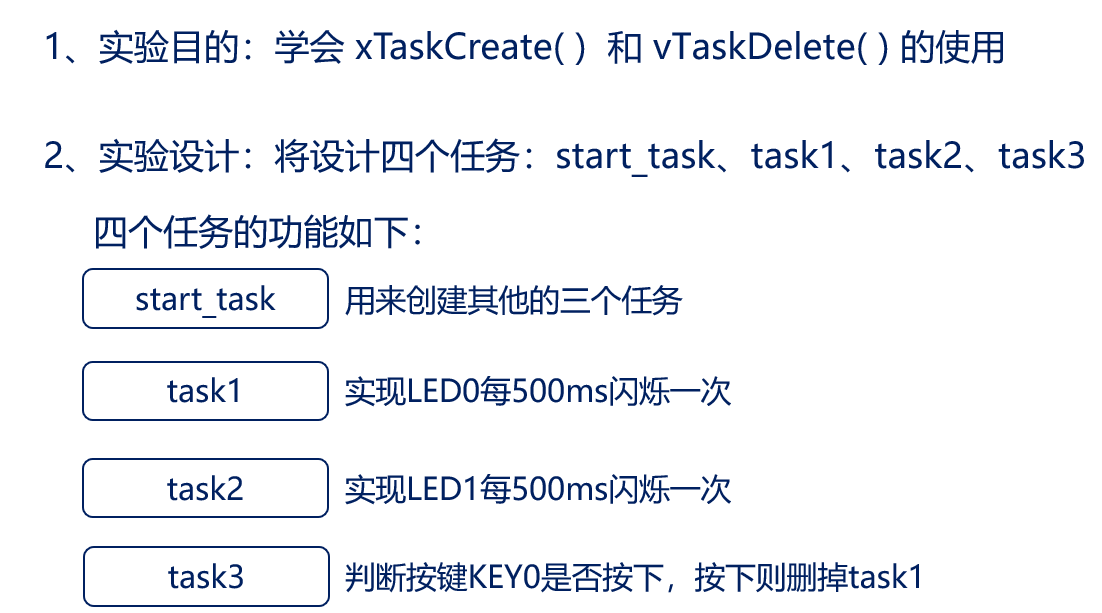
代码
freertos_demo.c
/**
****************************************************************************************************
* @file freertos.c
* @author 正点原子团队(ALIENTEK)
* @version V1.4
* @date 2022-01-04
* @brief FreeRTOS 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_STACK_SIZE 128
#define START_TASK_PRIO 1
TaskHandle_t start_task_handler;
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
#define TASK3_STACK_SIZE 128
#define TASK3_PRIO 4
TaskHandle_t task3_handler;
void start_task( void * pvParameters );
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key=key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler!=NULL)
{
printf("删除task1任务!!!\r\n");
vTaskDelete(task1_handler);
task1_handler=NULL;
}
}
vTaskDelay(10);
}
}
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate(start_task, "start_task", START_TASK_STACK_SIZE, NULL, START_TASK_PRIO, &start_task_handler);
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); //进入临界区
xTaskCreate(task1, "task1", TASK1_STACK_SIZE, NULL, TASK1_PRIO, &task1_handler);
xTaskCreate(task2, "task2", TASK2_STACK_SIZE, NULL, TASK2_PRIO, &task2_handler);
xTaskCreate(task3, "task3", TASK3_STACK_SIZE, NULL, TASK3_PRIO, &task3_handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL(); //退出临界区
}
任务创建和删除(静态方法)
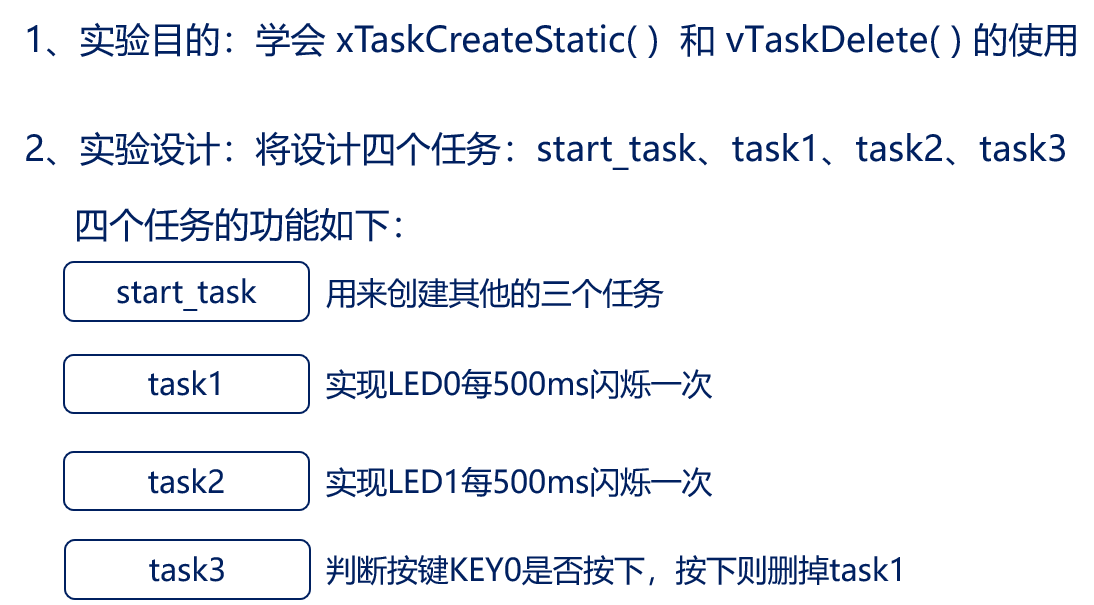
代码
freertos_demo.c
/**
****************************************************************************************************
* @file freertos.c
* @author 正点原子团队(ALIENTEK)
* @version V1.4
* @date 2022-01-04
* @brief FreeRTOS 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_STACK_SIZE 128
#define START_TASK_PRIO 1
TaskHandle_t start_task_handler;
StackType_t start_task_stack[START_TASK_STACK_SIZE];
StaticTask_t start_task_tcb;
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
StackType_t task1_stack[TASK1_STACK_SIZE];
StaticTask_t task1_tcb;
#define TASK2_STACK_SIZE 128
#define TASK2_PRIO 3
TaskHandle_t task2_handler;
StackType_t task2_stack[TASK2_STACK_SIZE];
StaticTask_t task2_tcb;
#define TASK3_STACK_SIZE 128
#define TASK3_PRIO 4
TaskHandle_t task3_handler;
StackType_t task3_stack[TASK3_STACK_SIZE];
StaticTask_t task3_tcb;
void start_task( void * pvParameters );
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key=key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler!=NULL)
{
printf("删除task1任务!!!\r\n");
vTaskDelete(task1_handler);
task1_handler=NULL;
}
}
vTaskDelay(10);
}
}
/* 空闲任务配置 */
StaticTask_t idle_task_tcb;
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE];
/* 软件定时器配置 */
StaticTask_t timer_task_tcb;
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH];
/* 空闲任务内存分配 */
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer=&idle_task_tcb;
*ppxIdleTaskStackBuffer=idle_task_stack;
*pulIdleTaskStackSize=configMINIMAL_STACK_SIZE;
}
/* 软件定时器内存分配 */
void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,
StackType_t ** ppxTimerTaskStackBuffer,
uint32_t * pulTimerTaskStackSize )
{
* ppxTimerTaskTCBBuffer=&timer_task_tcb;
* ppxTimerTaskStackBuffer=timer_task_stack;
*pulTimerTaskStackSize=configTIMER_TASK_STACK_DEPTH;
}
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
start_task_handler = xTaskCreateStatic(start_task, "start_task", START_TASK_STACK_SIZE, NULL, START_TASK_PRIO, start_task_stack, &start_task_tcb);
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); //进入临界区
task1_handler = xTaskCreateStatic(task1, "task1", TASK1_STACK_SIZE, NULL, TASK1_PRIO, task1_stack, &task1_tcb);
task2_handler = xTaskCreateStatic(task2, "task2", TASK2_STACK_SIZE, NULL, TASK2_PRIO, task2_stack, &task2_tcb);
task3_handler = xTaskCreateStatic(task3, "task3", TASK3_STACK_SIZE, NULL, TASK3_PRIO, task3_stack, &task3_tcb);
vTaskDelete(start_task_handler);
taskEXIT_CRITICAL(); //退出临界区
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号