
电源滤波器车辆状态估计,扩展卡尔曼滤波EKF,无迹卡尔曼滤波UKF
电源滤波器车辆状态估计,扩展卡尔曼滤波EKF,无迹卡尔曼滤波UKF
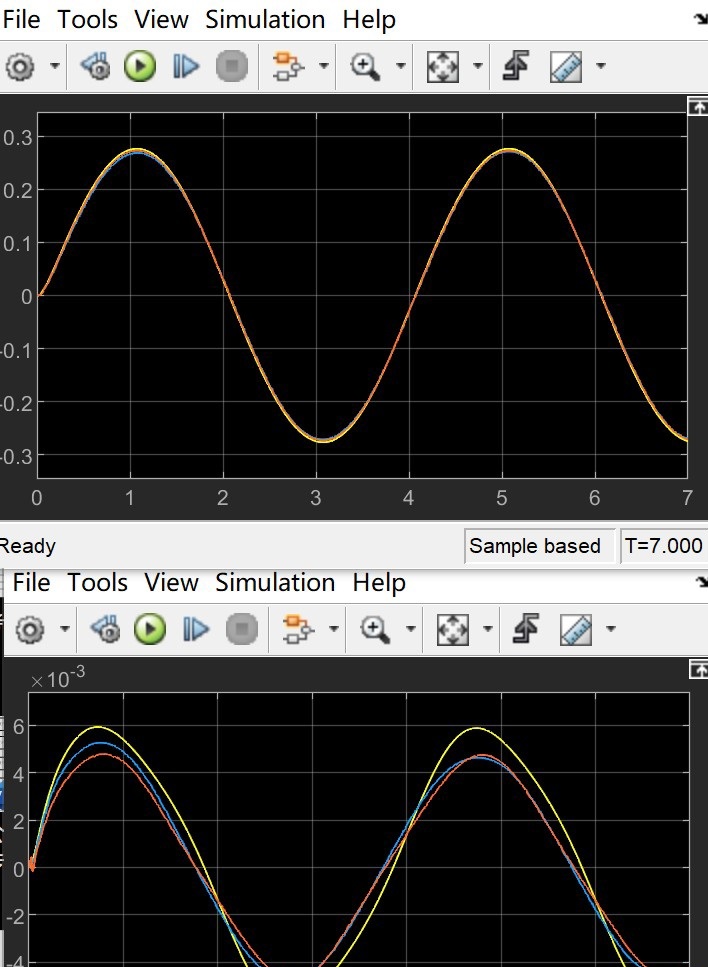
角阶跃输入+整车7自由度模型+UKF状态估计模型+附送EKF状态估计模型,针对于轮毂电机分布式驱动车辆,进行车速,质心侧偏角,横摆角速度估计。
模型输入:方向盘转角delta,车辆纵向加速度ax
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β
ID:3682670420964399

电源滤波器车辆状态估计,扩展卡尔曼滤波EKF,无迹卡尔曼滤波UKF
角阶跃输入+整车7自由度模型+UKF状态估计模型+附送EKF状态估计模型,针对于轮毂电机分布式驱动车辆,进行车速,质心侧偏角,横摆角速度估计。
模型输入:方向盘转角delta,车辆纵向加速度ax
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β
ID:3682670420964399

 浙公网安备 33010602011771号
浙公网安备 33010602011771号