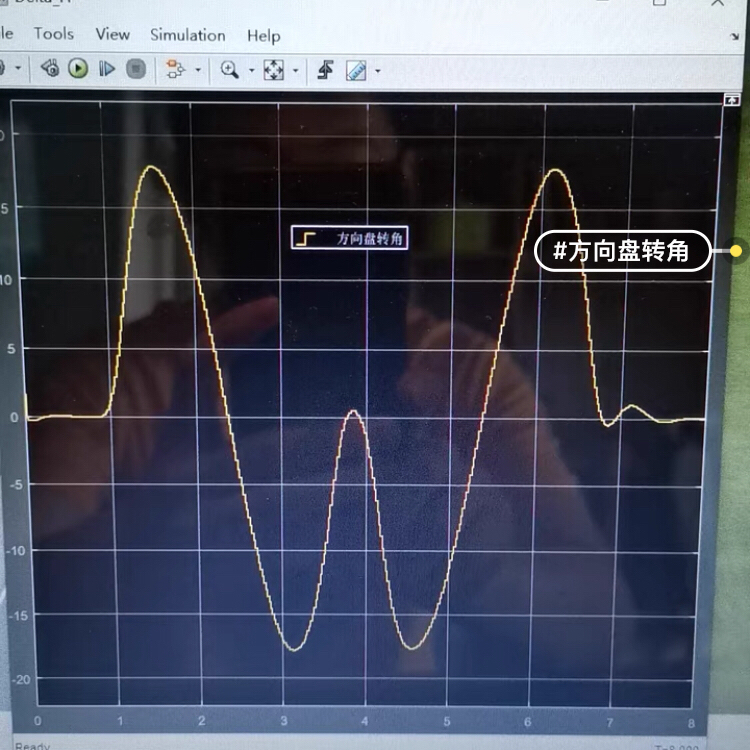
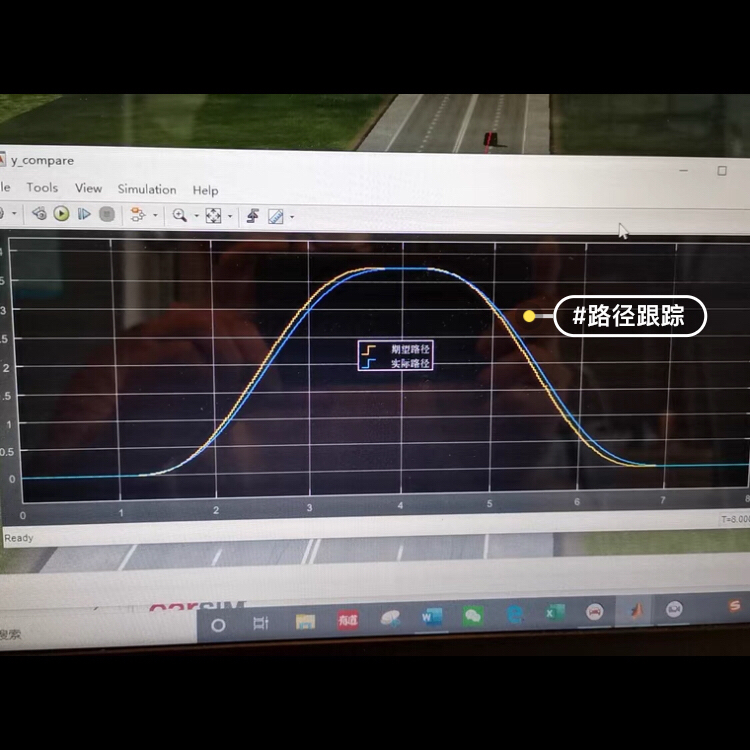
超车避幢通过五次多项式规划出超车路径,根据地横向避幢约束计算出最小纵向距离,确定转向避幢起始点,路径跟踪控制采用了mpc控制算法,加入了侧偏角软约束,在超车结束后返回原车道行驶。
采用16carsim和16B的matlab软件可送
ID:95100675738903505