Ros环境创建相关!超级简单!!超级详细!!
1、创建工作空间workspace
其中catkin_ws后面的ws是work_space的简写,指代工作空间
<catkin_ws是你的工作空间的名字,随便取>
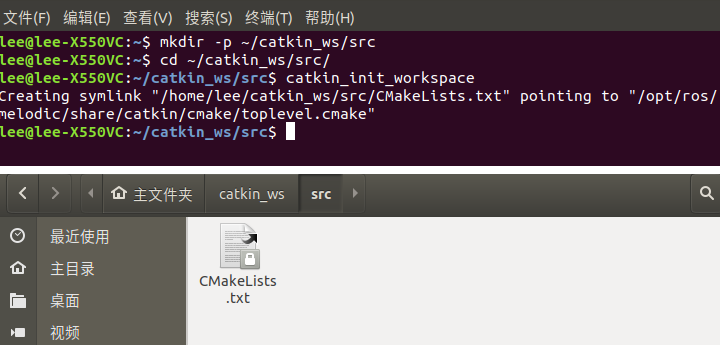
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
catkin_init_workspace
以下为执行结果:
2、编译生成build、devel代码等
cd ~/catkin_ws
catkin_make
3、设置工作空间环境
这个步骤的作用主要是为了让将设置在文件中的配置信息马上生效
比如你设了一个alias,或者一个$PATH
如果你不source修改的文件的话,只有等下次重启后才能生效
如果你source了就马上生效了
从当前shell会话中的文件读取和执行命令
(1) 暂时生效
source devel/setup.bash
echo $ROS_PACKAGE_PATH #这句话用来打印路径
source ~/.bashrc
(2)永久生效
echo "sourcu ~/catkin_ws/devel/setup.bash" >> ~/.bash
source ~/.bashrc
或者直接打开文件往里面写:
nano ~/.bashrc
在最后一行写进去这句话:
sourcu ~/write_your_workspace/devel/setup.bash
出来后再source一下
source ~/.bashrc
4、创建功能包
cd ~/catkin_ws/src/
catkin_create_pkg package_name depend1 depend2 depend3
使用catkin_create_pkg 创建功能包(package_name为要生成的文件名depend1,depend2…为功能包创建依赖)然后会在src中生成相应文件
使用
catkin_make
来编译一下

 浙公网安备 33010602011771号
浙公网安备 33010602011771号