摘要:
1. 前言 本文对带臂机器人的运动控制任务做一个简要总结 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 《Versatile Multi-Contact Planning and Control for Le 阅读全文
posted @ 2025-05-26 16:55
泪水下的笑靥
阅读(213)
评论(0)
推荐(0)
 0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni. 阅读全文
0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni. 阅读全文
 1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2. 阅读全文
1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2. 阅读全文
 0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处, 阅读全文
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处, 阅读全文
 一、前言 记录一个简单的安装和部署过程,尽管笔者也是按照教程来的,但奈何参考了很多教程,虽然写的都非常好,但是却很散,因此笔者这里想把这些教程的精华提炼出来,汇总并且写在正文处。还是老规矩,笔者也在学习,如有错误,请在评论区及时指出!感谢!也欢迎评论区一起讨论! 二、正文 0.bashrc 不知道大 阅读全文
一、前言 记录一个简单的安装和部署过程,尽管笔者也是按照教程来的,但奈何参考了很多教程,虽然写的都非常好,但是却很散,因此笔者这里想把这些教程的精华提炼出来,汇总并且写在正文处。还是老规矩,笔者也在学习,如有错误,请在评论区及时指出!感谢!也欢迎评论区一起讨论! 二、正文 0.bashrc 不知道大 阅读全文
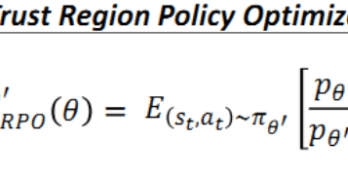
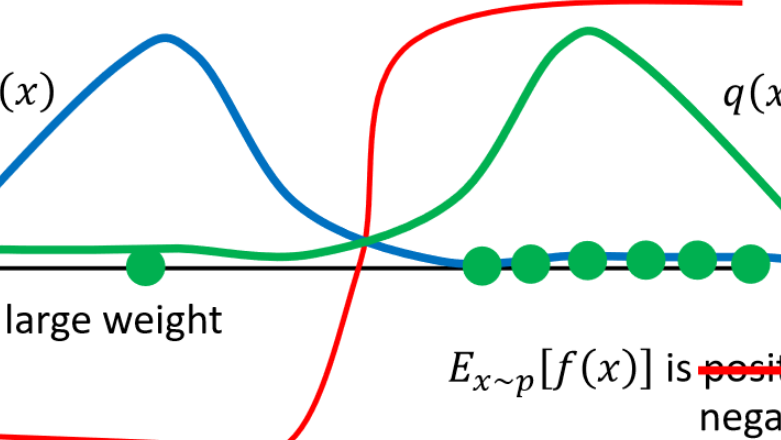 这个题图就涵盖了PPO主要的改进之处 阅读全文
这个题图就涵盖了PPO主要的改进之处 阅读全文
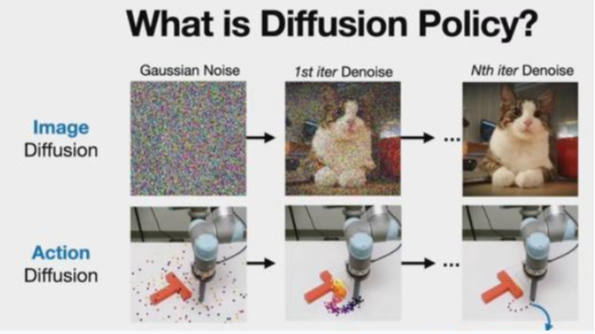 Diffusion Policy: Visuomotor Policy Learning via Action Diffusion Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Ru 阅读全文
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Ru 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号