1.cv2.Sobel(src, ddepth, dx, dy, ksize) 进行sobel算子计算
参数说明:src表示当前图片,ddepth表示图片深度,这里使用cv2.CV_64F使得结果可以是负值, dx表示x轴方向,dy表示y轴方向, ksize表示移动方框的大小
2.cv2.convertScalerAbs(src) 将像素点进行绝对值计算
参数说明: src表示当前图片
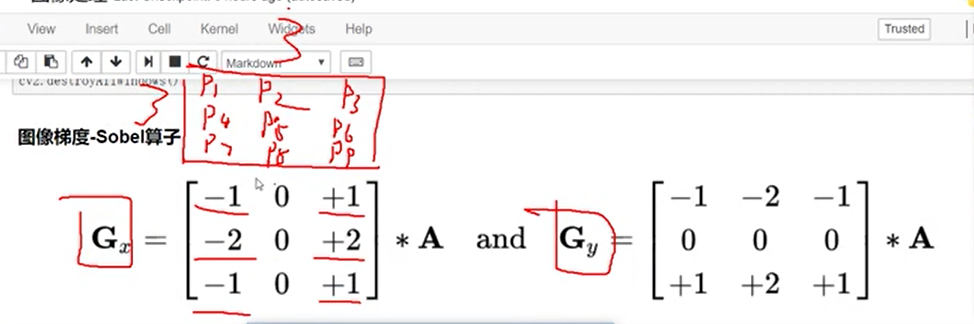
sobel算子:分为x轴方向和y轴方向上的,x轴方向上的算子如图中的Gx,将sober算子在图中进行平移,当前位置的像素值等于sobel算子与(当前位置与周边位置8个点)进行对应位置相乘并相加操作,作为当前位置的像素点,y轴方向的算子如Gy, 对于x轴方向上,即左右两边的比较,
计算方程为:x轴: p3 - p1 + 2 * p6 - 2 * p4 + p9 - p7, 右边的像素值减去左边的像素值
代码:
第一步:载入原始图片
第二步:使用cv2.Sobel(src, cv2.CV_64F, 1, 0, ksize=3) 对x轴方向进行sobel算子相乘操作
第三步:由于会出现负值的情况,因此使用cv2.convertScalerAbs() 转换为绝对值的形式
第四步:计算y轴方向上的sobel算子
第五步:使用cv2.addWeighted 将x轴方向的sobel算子的结果和y轴方向上的sobel算子的结果结合
第六步:使用cv2.Sobel(src, cv2.CV_64F, 1, 1, ksize=3) 直接获得x轴和y轴方向上的sobel算子结合
第七步:对这两个步骤获得的sobel算子作图
import cv2 import numpy as np # 第一步:加载图片 img = cv2.imread('pie.png') cv2.imshow('original', img) cv2.waitKey(0) cv2.destroyAllWindows()
# 第二步:对x轴方向上进行sobel算子相乘操作 x_sobel = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) cv2.imshow('x_sobel', x_sobel) cv2.waitKey(0) cv2.destroyAllWindows()
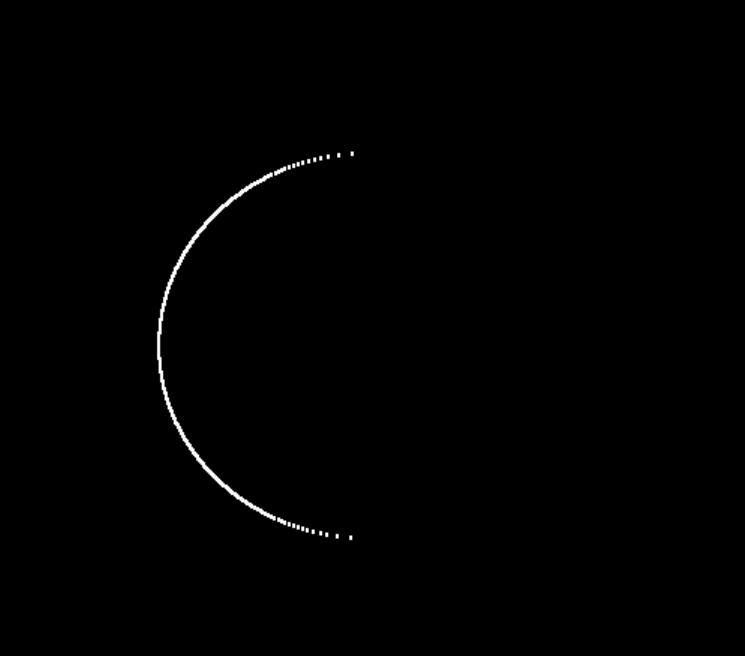 画图时的负值,使用0来进行表示,因此右侧是黑色的
画图时的负值,使用0来进行表示,因此右侧是黑色的
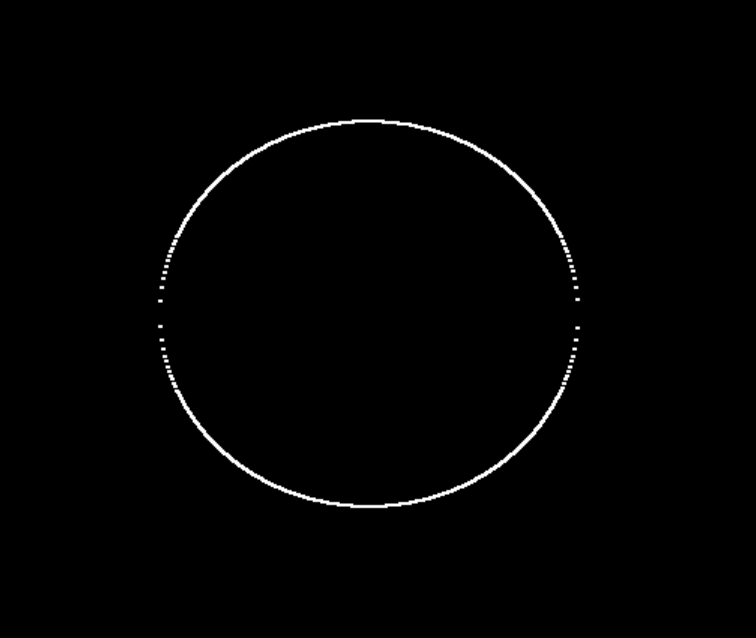
# 第三步:因为右侧像素减去左边像素,存在负值的情况,因此使用cv2.convertScaleAbs取绝对值操作 x_sobel = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) x_sobel = cv2.convertScaleAbs(x_sobel) cv2.imshow('x_sobel', x_sobel) cv2.waitKey(0) cv2.destroyAllWindows()

# 第四步:计算y轴的sobel算子 y_sobel = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3) y_sobel = cv2.convertScaleAbs(y_sobel) cv2.imshow('y_sobel', y_sobel) cv2.waitKey(0) cv2.destroyAllWindows()
# 第五步:并使用cv2.addweighted进行合并 xy_sobel = cv2.addWeighted(x_sobel, 0.5, y_sobel, 0.5, 0) # 第六步: 直接使用cv2.sobel 进行计算 xy_sobel_direct = cv2.Sobel(img, cv2.CV_64F, 1, 1, ksize=3) # 第七步:画图比较分步合并和一步到位的结果差异 cv2.imshow('imgs', np.hstack((xy_sobel, xy_sobel_direct))) cv2.waitKey(0) cv2.destroyAllWindows()
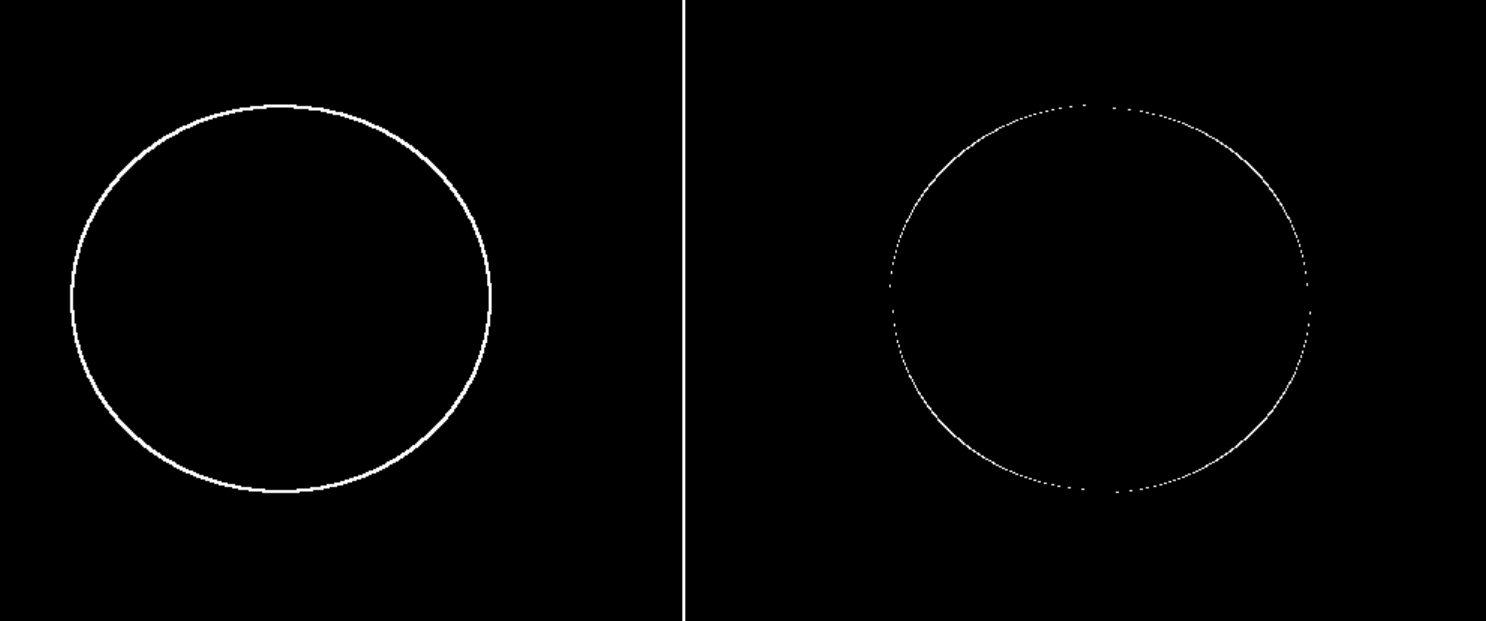 从图中我们可以看出x和y轴各自求,再做合并比直接求得的结果,轮廓更加的明显
从图中我们可以看出x和y轴各自求,再做合并比直接求得的结果,轮廓更加的明显

 浙公网安备 33010602011771号
浙公网安备 33010602011771号