linux下的串口通信原理及编程实例
linux下的串口通信原理及编程实例
一、串口的基本原理
1 串口通讯
串口通讯(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进行传输数据的一种通讯方式。串口是一种接口标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2 串口通讯的数据格式
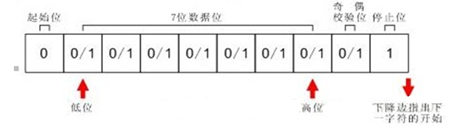
一个字符一个字符地传输,每个字符一位一位地传输,并且传输一个字符时,总是以“起始位”开始,以“停止位”结束,字符之间没有固定的时间间隔要求。
每一个字符的前面都有一位起始位(低电平),字符本身由7位数据位组成,接着字符后面是一位校验位(检验位可以是奇校验、偶校验或无校验位),最后是一位或一位半或二位停止位,停止位后面是不定长的空闲位,停止位和空闲位都规定为高电平。实际传输时每一位的信号宽度与波特率有关,波特率越高,宽度越小,在进行传输之前,双方一定要使用同一个波特率设置。
3 通讯方式
单工模式(Simplex Communication)的数据传输是单向的。通信双方中,一方固定为发送端,一方则固定为接收端。信息只能沿一个方向传输,使用一根传输线。
半双工模式(Half Duplex)通信使用同一根传输线,既可以发送数据又可以接收数据,但不能同时进行发送和接收。数据传输允许数据在两个方向上传输,但是,在任何时刻只能由其中的一方发送数据,另一方接收数据。因此半双工模式既可以使用一条数据线,也可以使用两条数据线。半双工通信中每端需有一个收发切换电子开关,通过切换来决定数据向哪个方向传输。因为有切换,所以会产生时间延迟,信息传输效率低些。
全双工模式(Full Duplex)通信允许数据同时在两个方向上传输。因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。在全双工模式中,每一端都有发送器和接收器,有两条传输线,信息传输效率高。
显然,在其它参数都一样的情况下,全双工比半双工传输速度要快,效率要高。
4 偶校验与奇校验
在标准ASCII码中,其最高位(b7)用作奇偶校验位。所谓奇偶校验,是指在代码传送过程中用来检验是否出现错误的一种方法,一般分奇校验和偶校验两种。奇校验规定:正确的代码一个字节中1的个数必须是奇数,若非奇数,则在最高位b7添1;偶校验规定:正确的代码一个字节中1的个数必须是偶数,若非偶数,则在最高位b7添1。
5 停止位
停止位是按长度来算的。串行异步通信从计时开始,以单位时间为间隔(一个单位时间就是波特率的倒数),依次接受所规定的数据位和奇偶校验位,并拼装成一个字符的并行字节;此后应接收到规定长度的停止位“1”。所以说,停止位都是“1”,1.5是它的长度,即停止位的高电平保持1.5个单位时间长度。一般来讲,停止位有1,1.5,2个单位时间三种长度。
6 波特率
波特率就是每秒钟传输的数据位数。
波特率的单位是每秒比特数(bps),常用的单位还有:每秒千比特数Kbps,每秒兆比特数Mbps。串口典型的传输波特率600bps,1200bps,2400bps,4800bps,9600bps,19200bps,38400bps。
PLC/PC与称重仪表通讯时,最常用的波特率是9600bps,19200bps。PLC/PC或仪表与大屏幕通讯时,最常用的波特率是600bps。
7 典型的串口通讯标准
EIA RS232(通常简称“RS232”): 1962年由美国电子工业协会(EIA)制定。
EIA RS485(通常简称“RS485”): 1983年由美国电子工业协会(EIA)制定。
8 RS232串口
RS232是计算机与通信工业应用中最广泛一种串行接口。它以全双工方式工作,需要地线、发送线和接收线三条线。RS232只能实现点对点的通信方式。
8.1 RS232串口缺点
●接口信号电平值较高,接口电路芯片容易损坏。
●传输速率低,最高波特率19200bps。
●抗干扰能力较差。
●传输距离有限,一般在15m以内。
●只能实现点对点的通讯方式。
8.2 RS232串口接口定义
RXD:接收数据,TXD:发送数据,GND/SG:信号地。
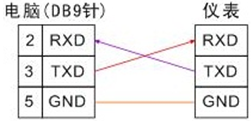
8.3 电脑DB9针接口定义
电脑DB9针接口是常见的RS232串口,其引脚定义如下:
2号脚:RXD(接收数据)
3号脚:TXD(发送数据)
5号脚:SG或GND(信号地)
其它脚:我们不用

电脑RS232串口与仪表串口连接图:
9 RS485串口
9.1 RS485串口特点
●RS485采用平衡发送和差分接收,具有良好的抗干扰能力,信号能传输上千米。
●RS485有两线制和四线制两种接线。采用四线制时,只能实现点对多的通讯(即只能有一个主设备,其余为从设备)。四线制现在很少采用,现在多采用两线制接线方式。
●两线制RS485只能以半双式方式工作,收发不能同时进行。
●RS485在同一总线上最多可以接32个结点,可实现真正的多点通讯,但一般采用的是主从通信方式,即一个主机带多个从机。
●因RS485接口具有良好的抗干扰能力,长的传输距离和多站能力等优点使其成为首选的串行接口。
10 串口通讯硬件常见的注意事项
●通讯电缆端子一定接牢,不可有任何松动,否则,可能会烧坏仪表或上位机的通讯板。
●不可带电拔插通讯端子,否则,可能会烧坏仪表或上位机的通讯板,一定要关闭仪表电源后才能去拔插通讯端子或接通讯线。
●通讯用的屏蔽电缆最好选用双层隔离型屏蔽电缆,其次选用单层屏蔽电缆,最好不要选用无屏蔽层的电缆,且电缆屏蔽层一定要能完全屏蔽,有些质量差的电缆,屏蔽层很松散,根本起不到屏蔽的作用。单层屏蔽的电缆屏蔽层应一端接地,双层屏蔽的电缆屏蔽层其外层(含铠装)应两端接地,内层屏蔽则应一端接地。
●仪表使用RS232通讯时,通讯电缆长度不得超过15米。
●一般RS485协议的接头没有固定的标准,可能根据厂家的不同引脚顺序和管脚功能可能不尽相同,用户可以查阅相关产品RS485的引脚图。
●RS485通讯电缆最好选用阻阬匹配、低衰减的RS485专用通讯电缆(双绞线),不要使用普通的双绞电缆或质量较差的通讯电缆。因为普通电缆或质量差的通讯电缆,可能阻抗不匹配、衰减大、绞合度不够、屏蔽层太松散,这样会导致干扰将非常大,会造成通讯不畅,甚至通讯不上。
●仪表使用RS485通讯时,每台仪表必须手牵手地串下去,不可以有星型连接或者分叉,如果有星型连接或者分叉,干扰将非常大,会造成通讯不畅,甚至通讯不上。
●485总线结构理论上传输距离达到1200米,一般是指通讯线材优质达标,波特率9600,只有一台485设备才能使得通讯距离达到1200米,而且能通讯并不代表每次通讯都正常,所以通常485总线实际的稳定通讯距离远远达不到1200米。负载485设备多,线材阻抗不同时,通讯距离更短。
●仪表使用RS485通讯时,必要时,请接入终端电阻,以增强系统的抗干扰性,典型的终端电阻阻值是120欧。
11 串口通讯软件设置要点
11.1 有关通讯的一些基本概念
●主机与从机:在通讯系统中起主要作用、发布主要命令的称为主机,接受命令的称为从机。
●连续方式:指主机不需要发布命令,从机就能自动地向主机发送数据。
●指令方式:指主机向从机发布命令,从机根据指令执行动作,并将结果“应答”给主机的模式。
●输出数据类型:指在连续方式通讯时,从机输出给主机的数据类型。
●通讯协议:指主机与从机通讯时,按哪一种编码规则来通讯。
●波特率:主从机之间通讯的速度。
●数据位:每次传输数据时,数据由几位组成。
●校验位:数据传输错误检测,可以是奇校验、偶校验或无校验。
●地址:每一台从机的编号。
11.2 主从机之间通讯设置要点
●要点一:主/从RS232/485硬件有无设置正确,通讯线有无接对。有些通讯板卡是RS422与RS485共用的,依靠板上跳线来实现的,有些仪表RS232/485也需要通讯跳线来实现。
●要点二:主机上的通讯端口有无设置正确;超时(一般设置为2s)、通讯延时(一般设置为5~20ms)、ACK信号延时(一般设置为0ms)有无设置正确。
●要点三:主/从机通讯协议有无选择正确。
●要点四:主/从机波特率有无选择正确。
●要点五:主/从机数据位有无选择正确。数据位可以选择7位,8位。
●要点六:主/从机校验位有无选择正确。校验位一般可选择偶校验、奇校验、无校验。
●要点七:主/从机停止位有无选择正确。停止位可以选择1位、1.5位还是2位。
●要点八:从机地址有无选择正确。
●要点九:主/从机的通讯方式有无选择正确。
进行通讯测试的时候经常会进行线路测试,测试所用的串口线是否可用,方法有二如下:
1> 把串口线接到不同的串口,用串口调试工具从一个串口发数据,另一个能正常收到说明串口线是OK的。
2> 把串口线的一端短接(用金属把2,3号脚连通),用万用表测另一端的2,3号如果正常的话会有嘀嘀的短接报警声。
二、linux下串口的基本操作
1、串口的操作
1.1打开:fd = open("/dev/ttySAC1", O_RDWR | O_NOCTTY | O_NDELAY);
O_RDWR 读写方式打开;
O_NOCTTY 不允许进程管理串口(不太理解,一般都选上);
O_NDELAY 非阻塞(默认为阻塞,打开后也可以使用fcntl()重新设置)
1.2写入:n = write(fd, "linux", 5);
n实际写入字节数;
1.3读取:res = read(fd,buf,len);
res 读取的字节数;
1.4设置:fcntl(fd, F_SETFL, FNDELAY); //非阻塞
fcntl(fd, F_SETFL, 0); // 阻塞
1.5关闭:close(fd);
2、串口配置
struct termios options; // 串口配置结构体
tcgetattr(fd,&options); //获取当前设置
bzero(&options,sizeof(options));
options.c_cflag |= B115200 | CLOCAL | CREAD; // 设置波特率,本地连接,接收使能
options.c_cflag &= ~CSIZE; //屏蔽数据位
options.c_cflag |= CS8; // 数据位为 8 ,CS7 for 7
options.c_cflag &= ~CSTOPB; // 一位停止位, 两位停止为 |= CSTOPB
options.c_cflag &= ~PARENB; // 无校验
//options.c_cflag |= PARENB; //有校验
//options.c_cflag &= ~PARODD // 偶校验
//options.c_cflag |= PARODD // 奇校验
options.c_cc[VTIME] = 0; // 等待时间,单位百毫秒 (读)。后有详细说明
options.c_cc[VMIN] = 0; // 最小字节数 (读)。后有详细说明
tcflush(fd, TCIOFLUSH); // TCIFLUSH刷清输入队列。
TCOFLUSH刷清输出队列。
TCIOFLUSH刷清输入、输出队列。
tcsetattr(fd, TCSANOW, &options); // TCSANOW立即生效;
TCSADRAIN:Wait until everything has been transmitted;
TCSAFLUSH:Flush input and output buffers and make the change
3、VTIME 和 VMIN
VTIME 定义要求等待的零到几百毫秒的值(通常是一个8位的unsigned char变量)。
VMIN 定义了要求等待的最小字节数, 这个字节数可能是0。
只有设置为阻塞时这两个参数才有效,仅针对于读操作。
说起来比较复杂,举个例子吧,设置为阻塞状态,写操作未进行实验,这里仅讨论读操作,
read(fd,&buf,8); // 读串口
3.1
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
VMIN = 0,当缓冲区字节数 >= 0 时进行读操作,实际上这时读串口操作并未被阻塞,因为条件始终被满足。
3.2
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 1;
VMIN = 1,当缓冲区字节数 >= 1 时进行读操作,当没有数据时读串口操作被阻塞。
3.3
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 4;
VMIN = 4,当缓冲区字节数 >= 4 时进行读操作,否则读串口操作被阻塞。每次读出的最大字节数由read函数中第三个参数决定。直到缓冲区剩下的数据< read 第三个参数 并且< 4 (如果这时read第三参数为 1 则进行4次读操作直至读完缓冲区,如read第三参数为2,连续进行读操作,直至缓冲区空或还剩一个字符)。没有设置VTIME,剩下的字符没有确定的期限,直到下次满足读条件的时候才被读出。
----------------------------------考虑VTIME-----------------------------
3.4
options.c_cc[VTIME] = 10; //单位百毫秒
options.c_cc[VMIN] = 4;
同3.3的区别就是,没满足条件或读缓冲区中剩下的数据会在1秒(10百毫秒)后读出。另外特别注意的是当设置VTIME后,如果read第三个参数小于VMIN ,将会将VMIN 修改为read的第三个参数,即使用read(fd,&buf,2);,以上设置变为:
options.c_cc[VTIME] = 10;
options.c_cc[VMIN] = 2;
=====================================================================
1>打开串口函数open_port()中要实现的函数:
(1)open("/dev/ttys0",O_RDWR | O_NOCTTY | O_NDELAY);/*打开串口0*/
(2)fcntl(fd,F_SETFL,0)/*恢复串口为阻塞状态*/
(3)isatty(STDIN_FILENO) /*测试是否为中断设备 非0即是中断设备*/
2> 配置串口参数函数set_opt()中要实现的函数:
(1)保存原先有串口配置
tcgetattr(fd,&oldtio);
(2)先将新串口配置清0
bzore(&newtio,sizeof(newito));
(3)激活选项CLOCAL和CREAD 并设置数据位大小
newtio.c_cflag |=CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
newtio.c_cflag |=CS8;
(4)设置奇偶校验
奇校验:
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
偶校验:
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PAREND;
newtio.c_cflag &= ~PARODD;
无奇偶校验:
newtio.c_cflag &= ~PARENB;
(5) 设置停止位
newtio.c_cflag &= ~CSTOPB; /*停止位为1*/
newtio.c_cflag |= CSTOPB;/*停止位为0*/
(6)设置波特率:
cfsetispeed(&newtio,B115200);
cfsetospeed(&newtio,B115200);
(7)设置等待时间和最小接受字符:
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
(8)处理为接收字符:
tcflush(fd,TCIFLUSH);
(9)激活新配置:
tcsetattr(fd,TCSANOW,&newtio);
3.读写串口
write(fd,buff,8);
read(fd,buff,8);
三、串口编程实例:
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <stdlib.h>
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
{
/* 五个参量 fd打开文件 speed设置波特率 bit数据位设置 neent奇偶校验位 stop停止位 */
struct termios newtio,oldtio;
if ( tcgetattr( fd,&oldtio) != 0) {
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
switch( nBits )
{
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
switch( nEvent )
{
case 'O':
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E':
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N':
newtio.c_cflag &= ~PARENB;
break;
}
switch( nSpeed )
{
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
if( nStop == 1 )
newtio.c_cflag &= ~CSTOPB;
else if ( nStop == 2 )
newtio.c_cflag |= CSTOPB;
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH);
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
printf("set done!\n");
return 0;
}
int open_port(int fd,int comport)
{
/* fd 打开串口 comport表示第几个串口 */
char *dev[]={"/dev/ttyS0","/dev/ttyS1","/dev/ttyS2"};
long vdisable;
if (comport==1)
{ fd = open( "/dev/ttyS0", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
else
printf("open ttyS0 .....\n");
}
else if(comport==2)
{ fd = open( "/dev/ttyS1", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
else
printf("open ttyS1 .....\n");
}
else if (comport==3)
{
fd = open( "/dev/ttyS2", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
else
printf("open ttyS2 .....\n");
}
if(fcntl(fd, F_SETFL, 0)<0)
printf("fcntl failed!\n");
else
printf("fcntl=%d\n",fcntl(fd, F_SETFL,0));
if(isatty(STDIN_FILENO)==0)
printf("standard input is not a terminal device\n");
else
printf("isatty success!\n");
printf("fd-open=%d\n",fd);
return fd;
}
int main(void)
{
int fd;
int nread,i;
char buff[]="Hello\n";
if((fd=open_port(fd,1))<0){
perror("open_port error");
return;
}
if((i=set_opt(fd,115200,8,'N',1))<0){
perror("set_opt error");
return;
}
printf("fd=%d\n",fd);
// fd=3;
nread=read(fd,buff,8);
printf("nread=%d,%s\n",nread,buff);
close(fd);
return;
}
四、Linux 多线程串口通信
大概流程就是打开一个串口、然后进行串口设置。开启二个线程,一个线程写数据,另一个线程读数据。
代码如下:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <pthread.h>
#include <sys/time.h>
#define MAX 2
pthread_t thread[2];
pthread_mutex_t mut;
int fd;
int set_port(int fd,int nbits)
{
struct termios newtio,oldtio;
if(tcgetattr(fd,&oldtio)!=0)
{
perror("pei zhi cuo wu1\n");
return -1;
}
bzero(&newtio,sizeof(newtio)); //清零
newtio.c_cflag |=CLOCAL|CREAD;//用于本地连接和接收使能
newtio.c_cflag &=~CSIZE;//设置数据位
switch(nbits)
{
case 7:
newtio.c_cflag |=CS7;break;
case 8:
newtio.c_cflag |=CS8;break;
}
//设置奇校验位
newtio.c_cflag |=PARENB;
//设置波特率
cfsetispeed(&newtio,B115200);
cfsetospeed(&newtio,B115200);
//设置停止位
newtio.c_cflag &=~PARENB;
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("pei zhi cuo wu2\n");
return -1;
}
printf("bao cun wan bi \n");
return 0;
}
void *thread1()
{
int i;
printf ("thread1 \n");
for( i=0;i<MAX;i++){
pthread_mutex_lock(&mut);
if(i==0){
printf("write %d\n",i+1);
char buf1[]="AT+FCLASS=0\r\n";
int length=sizeof(buf1);
int j=write(fd,buf1,length);
puts(buf1);
if(j<0)printf("fa song shi bai\n");
printf("%d n",j);
}
else if(i==1){
printf("write %d\n",i+1);
char buf2[]="AT+CBST=7,0,0\r\n";
int length=sizeof(buf2);
int j=write(fd,buf2,length);
puts(buf2);
if(j<0)printf("fa song shi bai\n");
printf("%d \n",j)
}
sleep(3);
pthread_mutex_unlock(&mut);
}
printf("thread1 stop\n");
pthread_exit(NULL);
}
void *thread2()
{
int j;
sleep(1);
printf("thread2\n");
char buf[100];
for (j = 0; j< MAX; j++)
{
pthread_mutex_lock(&mut);
sleep(3);
printf("read %d\n",j+1);
int k=read(fd,buf,100);
printf("k+%d\n",k);
puts(buf);
pthread_mutex_unlock(&mut);
sleep(2);
}
printf("thread2 :stop\n");
pthread_exit(NULL);
}
void thread_create(void)
{
int temp;
memset(&thread, 0, sizeof(thread)); //comment1
/*创建线程*/
if((temp = pthread_create(&thread[0], NULL, thread1, NULL)) != 0) //comment2
printf("xian chegn 1 faile\n");
else
printf("xian cheng 1 chegn gong\n");
if((temp = pthread_create(&thread[1], NULL, thread2, NULL)) != 0) //comment3
printf("2 faile\n");
else
printf("2 surcess\n");
}
void thread_wait(void)
{
/*等待线程结束*/
if(thread[0] !=0) { //comment4
pthread_join(thread[0],NULL);
printf("1 stop \n");
}
if(thread[1] !=0) { //comment5
pthread_join(thread[1],NULL);
printf("2 stop \n");
}
}
int main(void) {
int i,j,k;
fd=open("/dev/ttyS2",O_RDWR|O_NOCTTY|O_NDELAY);
if(-1==fd)printf("mei da kai tong xin duan kou hao\n");
else
{
i=set_port(fd, 8);
if(i<0)
{
perror("pei zhi cuo wu3\n");
return 0;
}
pthread_mutex_init(&mut,NULL);
printf("creat preadth\n");
thread_create();
printf("chu li \n");
thread_wait();
close(fd);
}
return 0;
}
五、用select查询串口数据
select读主要实现的功能是,在一定时间内不停地看串口有没有数据,有数据则进行读,当时间过去后还没有数据,则返回超时错误。
具体的函数如下;
int read_datas_tty(int fd,char *rcv_buf,int sec,int usec)
{
int retval;
unsigned char tempchar2;
fd_set rfds;
struct timeval tv;
int ret,pos;
tv.tv_sec = sec;//set the rcv wait time
tv.tv_usec = usec;//100000us = 0.1s
while(1){
FD_ZERO(&rfds);
FD_SET(fd,&rfds);
retval = select(fd+1,&rfds,NULL,NULL,&tv);
if(retval ==-1)
{
perror("select()");
break;
}
else if(retval)
{
ret= read(fd,rcv_buf,1);
tempchar2 = rcv_buf;
printf("rcv_buf is %s\n",rcv_buf);
}
else
{
break;
}
}
return 1;
}
在前面的普通读写里面加上这个函数就可以了
它的调用方式为:
read_datas_tty(fd,buff,10,10);
这就表示等待时间为10S+10us
Linux下直接用read读串口可能会造成堵塞,或数据读出错误。然而用select先查询com口,再用read去读就可以避免,并且当com口延时时,程序可以退出,这样就不至于由于com口堵塞,程序就死了。我的代码如下:
bool ReadDevice( int hComm, unsigned long uLen, char* pData )
{
int nread = 0;
char inbuf[uLen];
char buff[uLen];
memset( inbuff, '\0', uLen );
memset( buff, '\0', uLen );
fd_set readset;
struct timeval tv;
int MaxFd = 0;
int c = 0;
int z;
do
{
FD_ZERO( &readset );
if( hComm >= 0 )
FD_SET( hComm, &readset );[A1]
/**
FD_SET(int fd,fd_set*set);用来设置描述词组set中相关fd的位
FD_ZERO(fd_set *set);用来清除描述词组set的全部位
FD_ISSET(int fd,fd_set *set);用来测试描述词组set中相关fd 的位是否为真
**/
MaxFd = hComm + 1;
tv.tv_sec = 0;
tv.tv_usec = 500000;
do
{
z = select( MaxFd, &readset, 0, 0, &tv);
}while( z==-1 && errno==EINTR[c1] );
/**
(1)当监视的相应的文件描述符集中满足条件时,比如说读文件描述符集中有数据到来时,内核(I/O)根据状态修改文件描述符集,并返回一个大于0的数。
(2)当没有满足条件的文件描述符,且设置的timeval监控时间超时时,select函数会返回一个为0的值。
(3)当select返回负值时,发生错误。
**/
if( z == -1 )
printf("select(2)\n");
if( z == 0 )
{
hComm = -1;
}
if( hComm>=0 && FD_ISSET(hComm, &readset) )
{
z = read( hComm, buff, uLen - c );
c += z;
if( z == -1 )
{
hComm = -1;
}
if( z > 0 )
{
buff[ z + 1 ] = '\0';
strcat( inbuff, buff );
memset( buff, 0x00, uLen );
}
else
{
hComm = -1;
}
}
}while( hComm >= 0 );
memcpy( pData, inbuff, c );
return true;
}
