

线性规划 LP(Linear programming,线性规划)是一种优化方法,在优化问题中目标函数和约束函数均为向量变量的线性函数,LP问题可描述为:
minf(x) :待最小化的目标函数(如果问题本身不是最小化问题,则应做适当转换,使其变为最小化问题,比如如果原始问题是最大化的话,目标函数 f = -f)A⋅x≤b :不等式约束Aeq⋅x=beq :等式约束lb≤x≤ub :取值范围约束(lb:lower bound,ub:upper bound)
[x, fval] = linprog(f,A,b,Aeq,beq,lb,ub)2. 线性规划模型的三要素
- 1)决策变量:需决策的量,即待求的未知数(
x ), - 2)目标函数:需优化的量,即欲达的目标,用决策变量的表达式表示(即目标函数是关于决策变量的函数
f(x) ) - 3)约束条件:为实现优化目标需受到的限制,用决策变量的等式(
Aeq⋅x=beq )或者不等式表示(Ax≤b )
3. 使用 matlab 求解实际问题
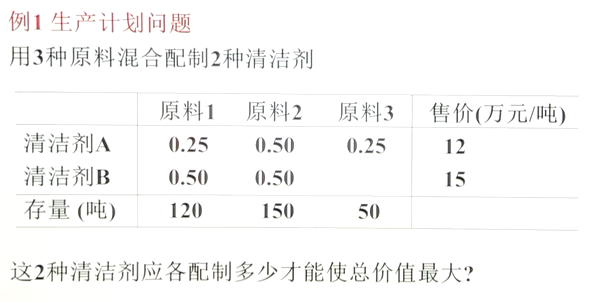
一定要明确其中 A, b; Aeq, beq; lb, ub
也即求解如下问题:
f = [-12, -15];
A = [.25, .5; .5, .5; .25, 0]; b = [120; 150; 50];
lb = [0; 0];
[x, fval] = linprog(f, A, b, [], [], lb, []);
 浙公网安备 33010602011771号
浙公网安备 33010602011771号