
Sobel 算子是一个离散的一阶微分算子,用来计算图像灰度函数的近似梯度。
在空间域上Sobel算子很容易实现,执行速度快,对部分噪声具有平滑作用,还能够提供较为精确的边缘方向信息,缺点是边缘定位精度不够高。边缘是指一个物体与另一个物体的分界处,一般边缘内外处都会有灰度值上的差异,Sobel算子就是通过像素点空间邻域内上下,左右相邻点的灰度加权运算,求取物体边缘。
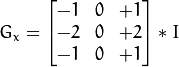
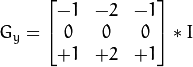
经典Sobel的卷积因子为:
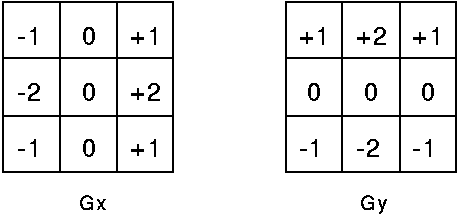
对于待检测边缘的图像I,分别在水平(X)方向和垂直方向(Y)方向求导,方法是分别图像I与卷积核Gx和Gy进行卷积,公式表述如下:
之后对求得的水平和垂直方向的梯度图像上的每一点执行:

或更为简单粗暴的:

G即为Sobel求得的梯度图像。
以下是C++实现:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
#include "iostream"
using namespace std;
using namespace cv;
int main(int argc,char *argv[])
{
Mat image=imread(argv[1],0);
Mat imageX=Mat::zeros(image.size(),CV_16SC1);
Mat imageY=Mat::zeros(image.size(),CV_16SC1);
Mat imageXY=Mat::zeros(image.size(),CV_16SC1);
Mat imageX8UC;
Mat imageY8UC;
Mat imageXY8UC;
if(!image.data)
{
return -1;
}
GaussianBlur(image,image,Size(3,3),0); //高斯滤波消除噪点
uchar *P=image.data;
uchar *PX=imageX.data;
uchar *PY=imageY.data;
int step=image.step;
int stepXY=imageX.step;
for(int i=1;i<image.rows-1;i++)
{
for(int j=1;j<image.cols-1;j++)
{
//通过指针遍历图像上每一个像素
PX[i*imageX.step+j*(stepXY/step)]=abs(P[(i-1)*step+j+1]+P[i*step+j+1]*2+P[(i+1)*step+j+1]-P[(i-1)*step+j-1]-P[i*step+j-1]*2-P[(i+1)*step+j-1]);
PY[i*imageX.step+j*(stepXY/step)]=abs(P[(i+1)*step+j-1]+P[(i+1)*step+j]*2+P[(i+1)*step+j+1]-P[(i-1)*step+j-1]-P[(i-1)*step+j]*2-P[(i-1)*step+j+1]);
}
}
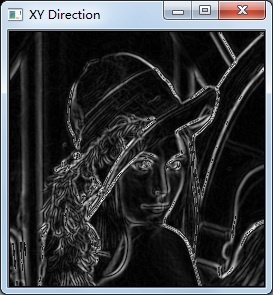
addWeighted(imageX,0.5,imageY,0.5,0,imageXY);//融合X、Y方向
convertScaleAbs(imageX,imageX8UC);
convertScaleAbs(imageY,imageY8UC);
convertScaleAbs(imageXY,imageXY8UC); //转换为8bit图像
Mat imageSobel;
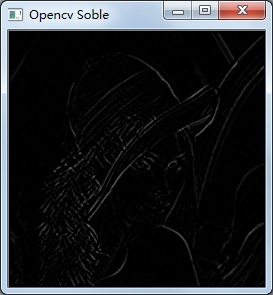
Sobel(image,imageSobel,CV_8UC1,1,1); //Opencv的Sobel函数
imshow("Source Image",image);
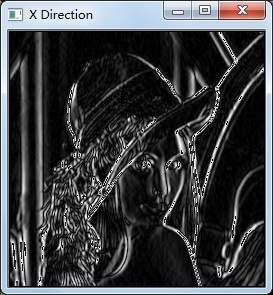
imshow("X Direction",imageX8UC);
imshow("Y Direction",imageY8UC);
imshow("XY Direction",imageXY8UC);
imshow("Opencv Soble",imageSobel);
waitKey();
return 0;
}原始的Lena美女;

X方向梯度:
Y方向梯度:

X、Y方向梯度融合效果:
Opencv Sobel函数效果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号