
Harris角点检测算子是对Moravec角点检测算子的改进。Moravec角点检测算子通过一个(2*N+1)*(2*N+1)的窗口在图像中逐像素滑动,计算原图像与滑动后图像的像素间的距离和来定义灰度的变化大小,包含了水平、垂直还有4个对角线方向一共8个方向上的移动。
Harris扩展了检测方向,检测结果具有旋转不变性;对滑块窗口使用了高斯系数,对离中心越近的点赋予更高的权重,以增强对噪声的干扰;
Opencv中cornerHarris函数可用于检测图像的Harris角点。cornerHarris函数各参数的说明:
void cornerHarris( InputArray src, //输入8bit单通道灰度Mat矩阵
OutputArray dst, //用于保存Harris角点检测结果,32位单通道,大于与src相同
int blockSize, //滑块窗口的尺寸
int ksize, //Sobel边缘检测滤波器大小
double k, //Harris中间参数,经验值0.04~0.06
int borderType=BORDER_DEFAULT //插值类型
);简单实现:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
#include "nonfree/features2d.hpp"
#include<iostream>
using namespace cv;
using namespace std;
Mat image;
Mat imageGray;
int thresh=200;
int MaxThresh=255;
void Trackbar(int,void*); //阈值控制
int main(int argc,char*argv[])
{
image=imread(argv[1]);
cvtColor(image,imageGray,CV_RGB2GRAY);
GaussianBlur(imageGray,imageGray,Size(5,5),1); // 滤波
namedWindow("Corner Detected");
createTrackbar("threshold:","Corner Detected",&thresh,MaxThresh,Trackbar);
imshow("Corner Detected",image);
Trackbar(0,0);
waitKey();
return 0;
}
void Trackbar(int,void*)
{
Mat dst,dst8u,dstshow,imageSource;
dst=Mat::zeros(image.size(),CV_32FC1);
imageSource=image.clone();
cornerHarris(imageGray,dst,3,3,0.04,BORDER_DEFAULT);
normalize(dst,dst8u,0,255,CV_MINMAX); //归一化
convertScaleAbs(dst8u,dstshow);
imshow("dst",dstshow); //dst显示
for(int i=0;i<image.rows;i++)
{
for(int j=0;j<image.cols;j++)
{
if(dstshow.at<uchar>(i,j)>thresh) //阈值判断
{
circle(imageSource,Point(j,i),2,Scalar(0,0,255),2); //标注角点
}
}
}
imshow("Corner Detected",imageSource);
}
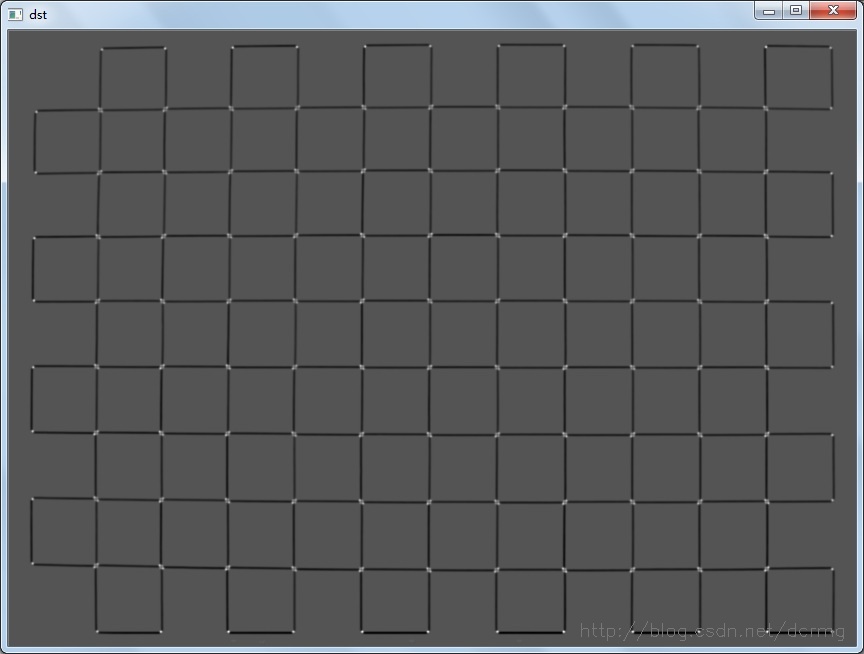
经过归一化转化的Harris角点检测结果图像,大小与原图像一致,每一个点的像素值大小对应的是原图像上该点是角点的概率,值越大,越有可能是角点:
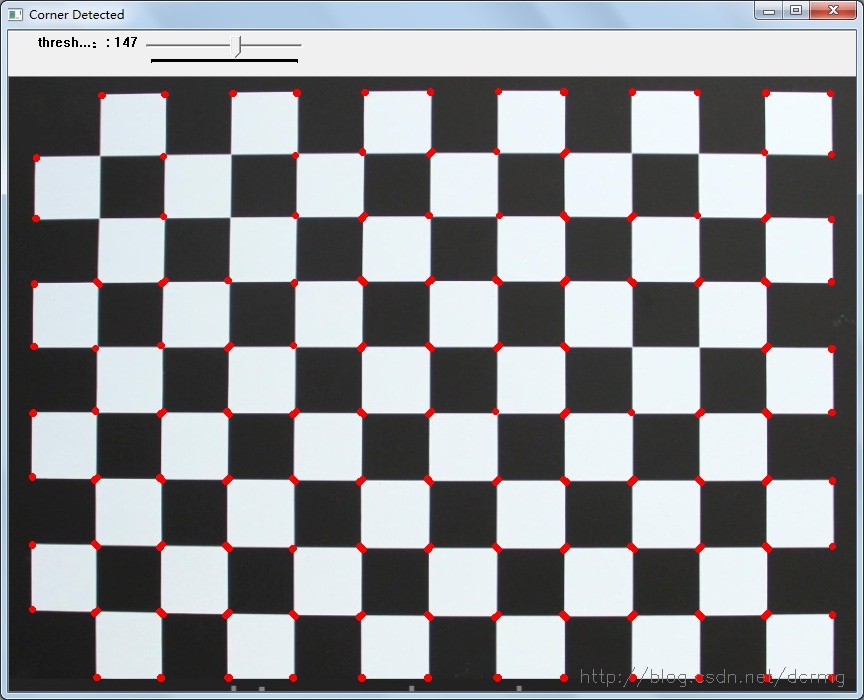
调整到某一阈值时角点检测效果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号