

J.Shi和C.Tomasi在1994年在其论文“Good Features to Track”中,提出了一种对Harris角点检测算子的改进算法——Shi-Tomasi角点检测算子,可以看到,Opencv中函数goodFeaturesToTrack就是直接取自他们论文的名字。
goodFeaturesToTrack有比cornerHarris更多的控制参数,函数原型:
void goodFeaturesToTrack( InputArray image, OutputArray corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray mask=noArray(), int blockSize=3,
bool useHarrisDetector=false, double k=0.04 );第二个参数corners:位置点向量,保存的是检测到的角点的坐标;
第三个参数maxCorners:定义可以检测到的角点的数量的最大值;
第四个参数qualityLevel:检测到的角点的质量等级,角点特征值小于qualityLevel*最大特征值的点将被舍弃;
第五个参数minDistance:两个角点间最小间距,以像素为单位;
第六个参数mask:指定检测区域,若检测整幅图像,mask置为空Mat();
第七个参数blockSize:计算协方差矩阵时窗口大小;
第八个参数useHarrisDetector:是否使用Harris角点检测,为false,则使用Shi-Tomasi算子;
第九个参数k:留给Harris角点检测算子用的中间参数,一般取经验值0.04~0.06。第八个参数为false时,该参数不起作用;
goodFeaturesToTrack检测Shi-Tomasi角点简单demo:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
using namespace cv;
Mat image;
Mat imageGray;
int thresh=5; //角点个数控制
int MaxThresh=255;
void Trackbar(int,void*);
int main(int argc,char*argv[])
{
image=imread(argv[1]);
cvtColor(image,imageGray,CV_RGB2GRAY);
GaussianBlur(imageGray,imageGray,Size(5,5),1); // 滤波
namedWindow("Corner Detected");
createTrackbar("threshold:","Corner Detected",&thresh,MaxThresh,Trackbar);
imshow("Corner Detected",image);
Trackbar(0,0);
waitKey();
return 0;
}
void Trackbar(int,void*)
{
Mat dst,imageSource;
dst=Mat::zeros(image.size(),CV_32FC1);
imageSource=image.clone();
vector<Point2f> corners;
goodFeaturesToTrack(imageGray,corners,thresh,0.01,10,Mat());
for(int i=0;i<corners.size();i++)
{
circle(imageSource,corners[i],2,Scalar(0,0,255),2);
}
imshow("Corner Detected",imageSource);
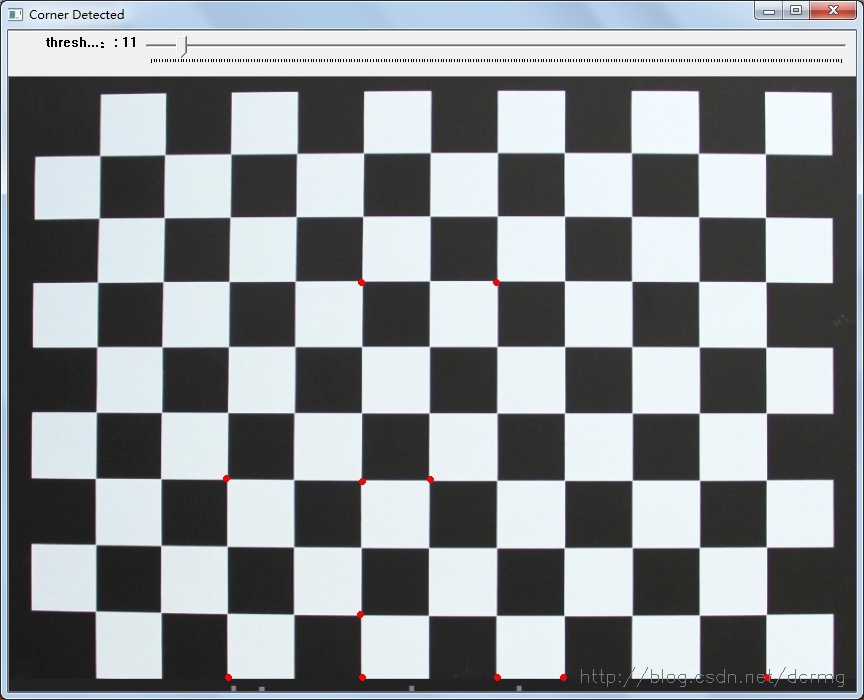
}goodFeaturesToTrack相比cornerHarris,增加了检测的复杂度,同时也可以更好的控制检测到的角点的特性,比如角点个数,角点间最小间距等。设置检测点数为11时,只有特征值最大的前11个角点被检测出来:
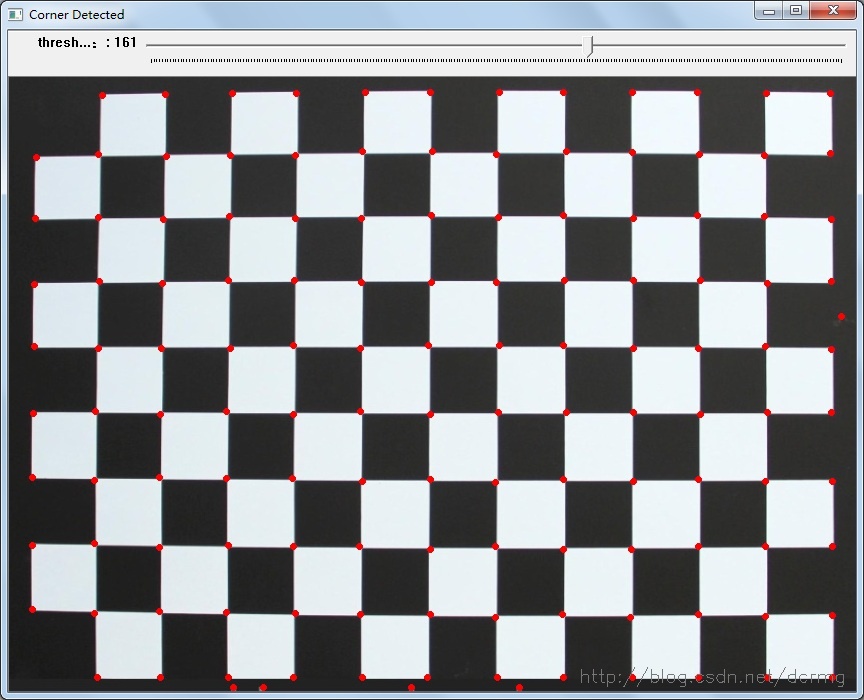
继续增大检测点数的值,所有角点都被检测出来:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号