

借助Keras和Opencv实现的神经网络中间层特征图的可视化功能,方便我们研究CNN这个黑盒子里到发生了什么。
自定义网络特征可视化
代码:
# coding: utf-8
from keras.models import Model
import cv2
import matplotlib.pyplot as plt
from keras.models import Sequential
from keras.layers.convolutional import Convolution2D,MaxPooling2D
from keras.layers import Activation
from pylab import *
import keras
def get_row_col(num_pic):
squr = num_pic ** 0.5
row = round(squr)
col = row + 1 if squr - row > 0 else row
return row,col
def visualize_feature_map(img_batch):
feature_map = np.squeeze(img_batch,axis=0)
print feature_map.shape
feature_map_combination=[]
plt.figure()
num_pic = feature_map.shape[2]
row,col = get_row_col(num_pic)
for i in range(0,num_pic):
feature_map_split=feature_map[:,:,i]
feature_map_combination.append(feature_map_split)
plt.subplot(row,col,i+1)
plt.imshow(feature_map_split)
axis('off')
title('feature_map_{}'.format(i))
plt.savefig('feature_map.jpg')
plt.show()
# 各个特征图按1:1 叠加
feature_map_sum = sum(ele for ele in feature_map_combination)
plt.imshow(feature_map_sum)
plt.savefig("feature_map_sum.jpg")
def create_model():
model = Sequential()
# 第一层CNN
# 第一个参数是卷积核的数量,第二三个参数是卷积核的大小
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(4, 4)))
#第二层CNN
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(3, 3)))
# 第三层CNN
model.add(Convolution2D(9, 5, 5, input_shape=img.shape))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
# 第四层CNN
model.add(Convolution2D(9, 3, 3, input_shape=img.shape))
model.add(Activation('relu'))
# model.add(MaxPooling2D(pool_size=(2, 2)))
return model
if __name__ == "__main__":
img = cv2.imread('001.jpg')
model = create_model()
img_batch = np.expand_dims(img, axis=0)
conv_img = model.predict(img_batch) # conv_img 卷积结果
visualize_feature_map(conv_img)这里定义了一个4层的卷积,每个卷积层分别包含9个卷积、Relu激活函数和尺度不等的池化操作,系数全部是随机初始化。
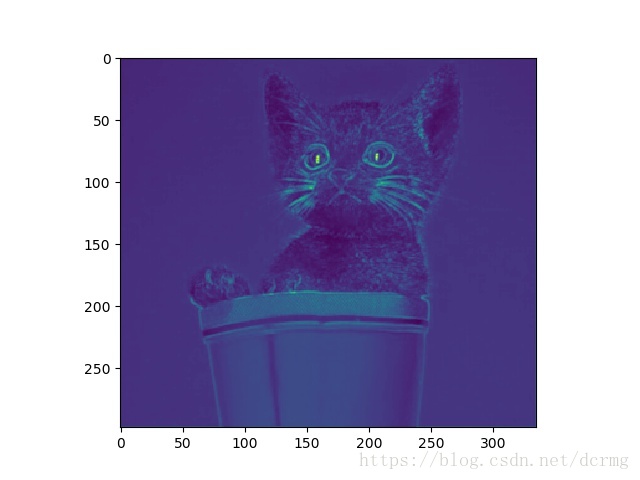
输入的原图如下:

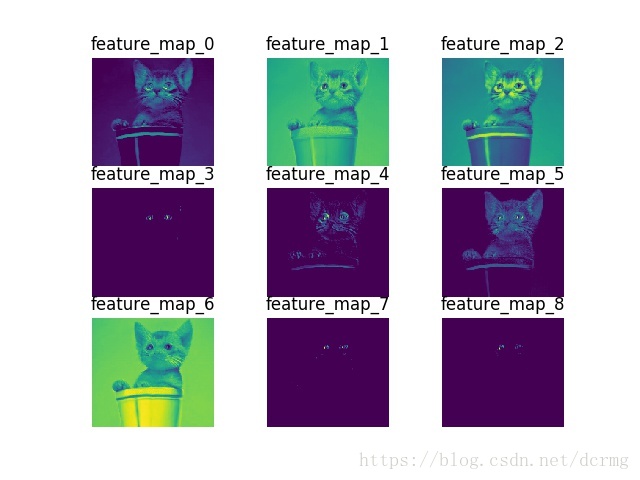
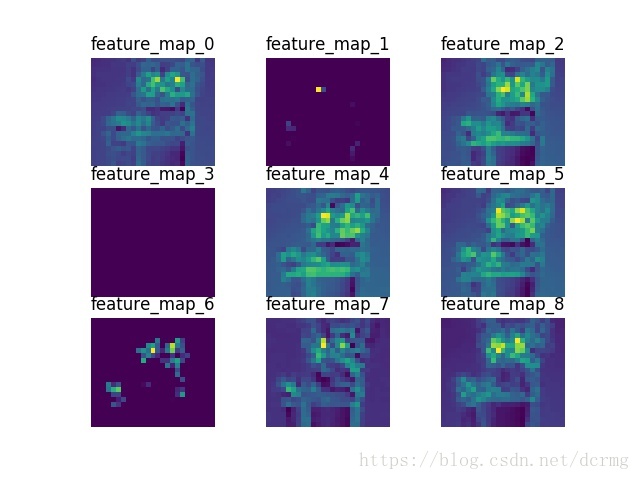
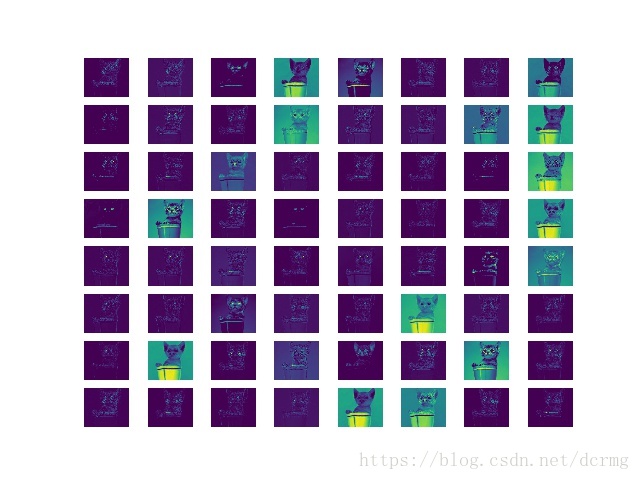
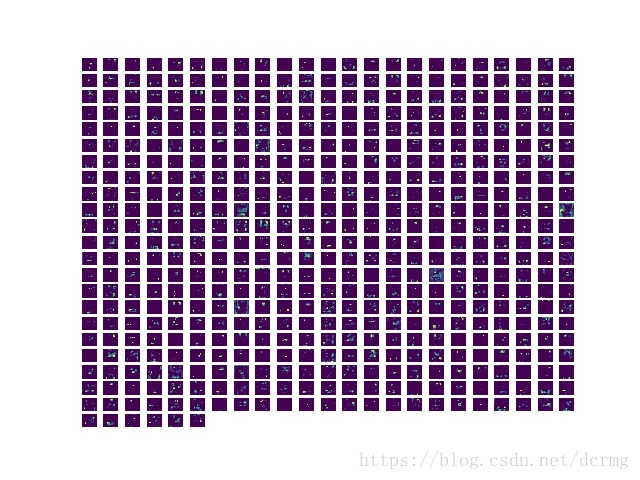
第一层卷积后可视化的特征图:
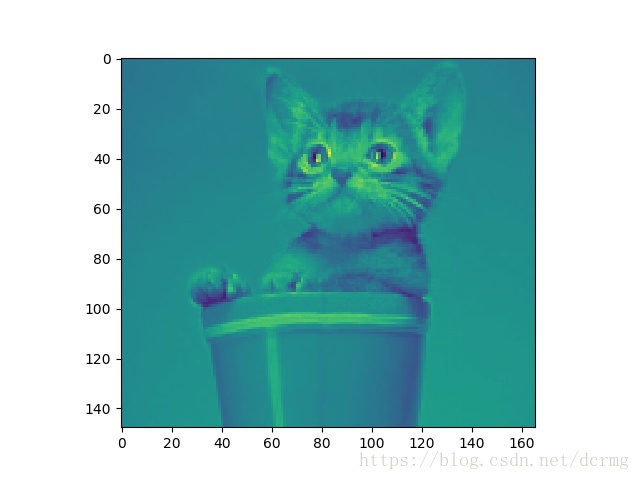
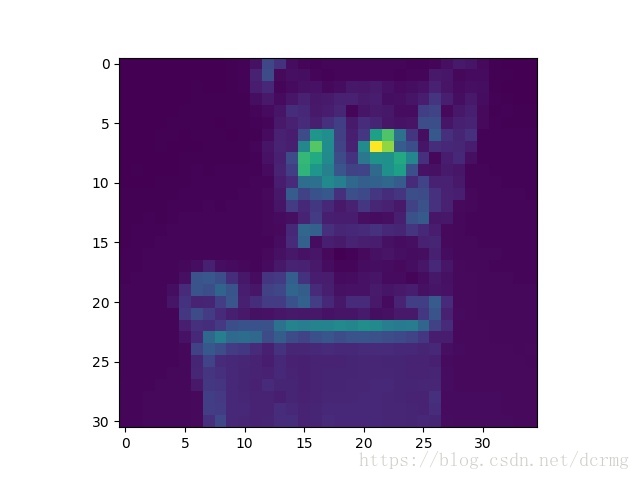
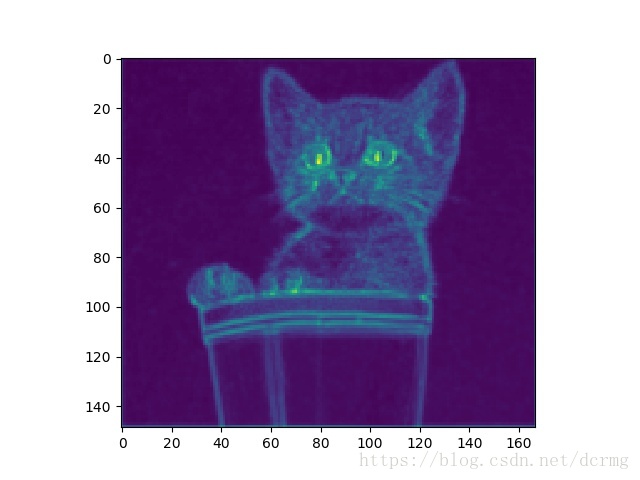
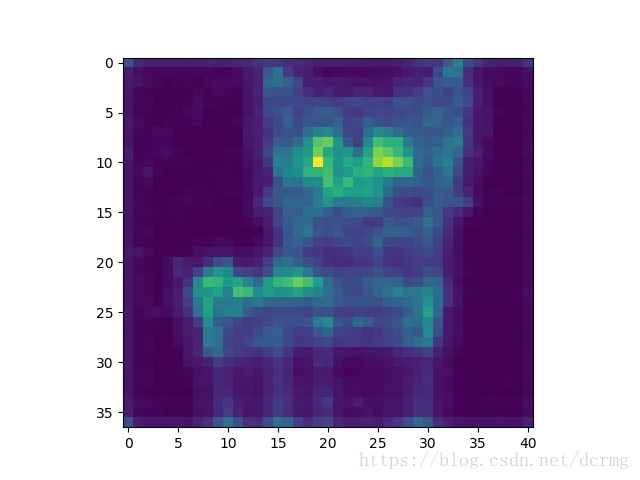
所有第一层特征图1:1融合后整体的特征图:
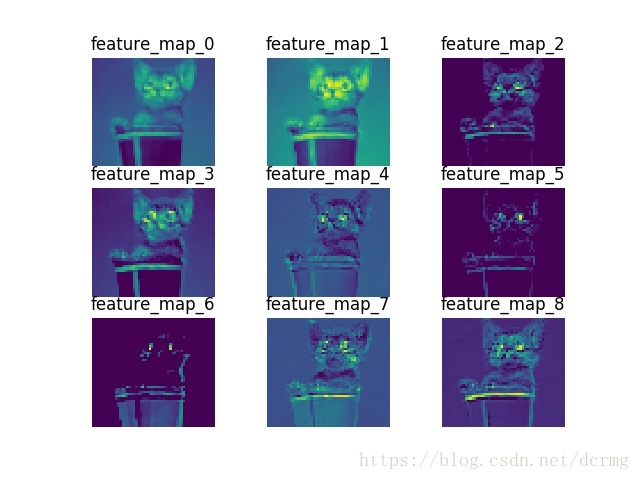
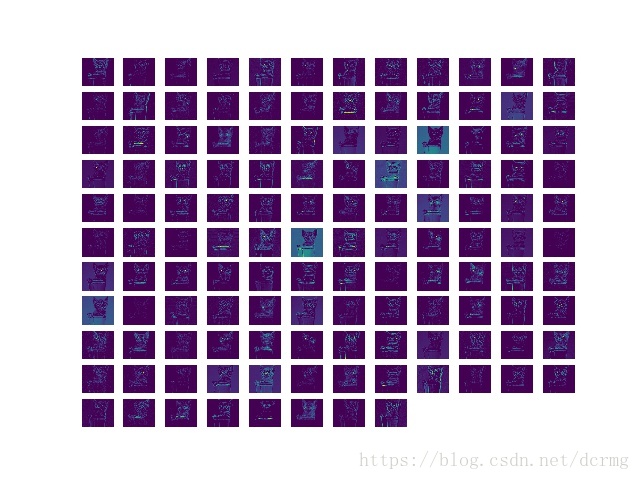
第二层卷积后可视化的特征图:
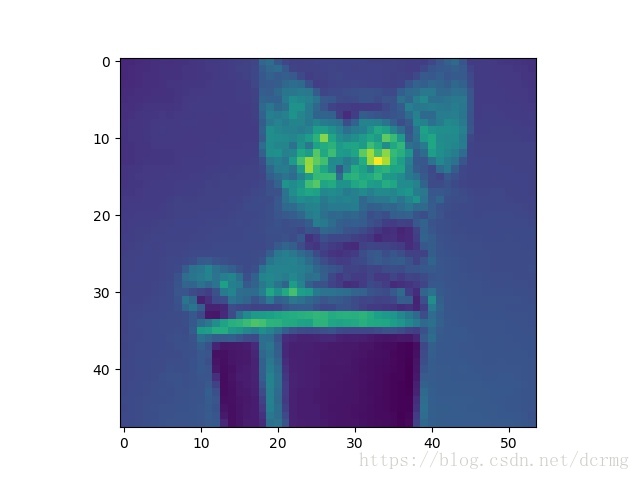
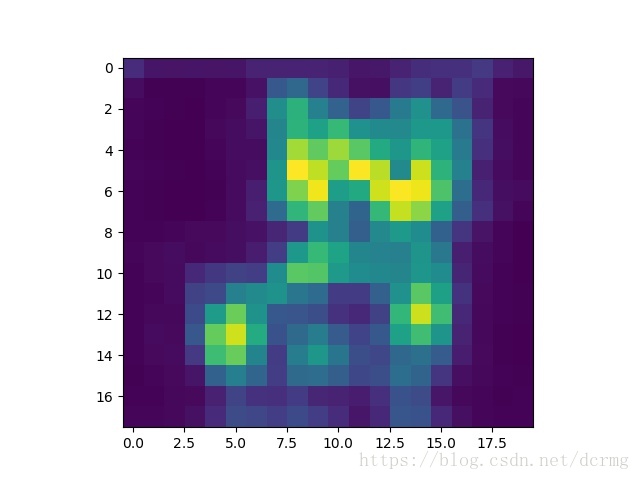
所有第二层特征图1:1融合后整体的特征图:
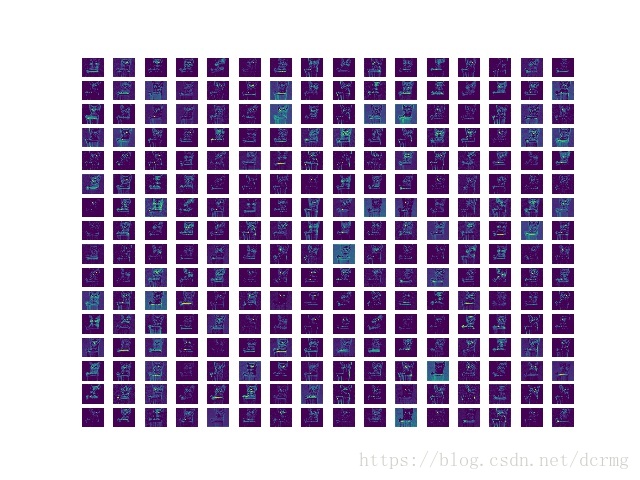
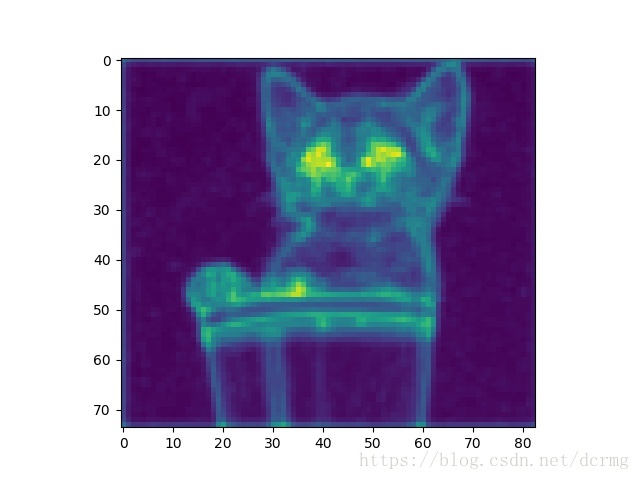
第三层卷积后可视化的特征图:
所有第三层特征图1:1融合后整体的特征图:
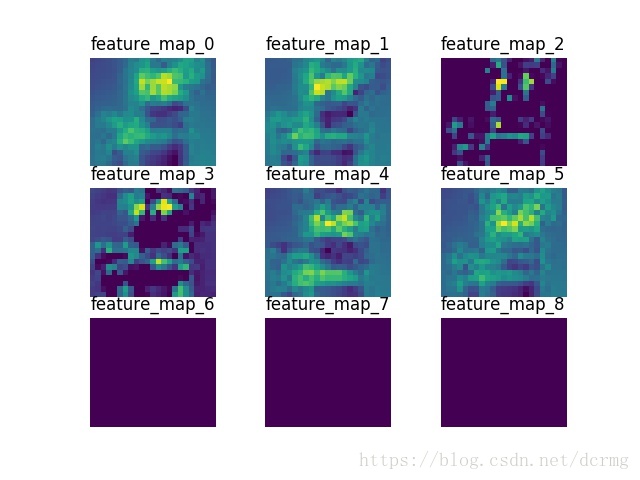
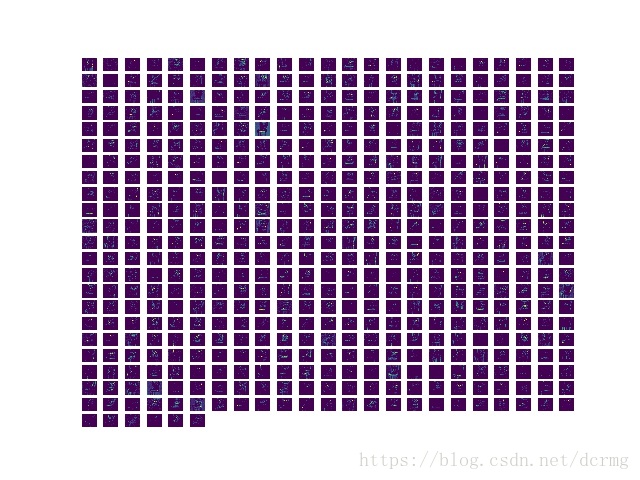
第四层卷积后可视化的特征图:
所有第四层特征图1:1融合后整体的特征图:
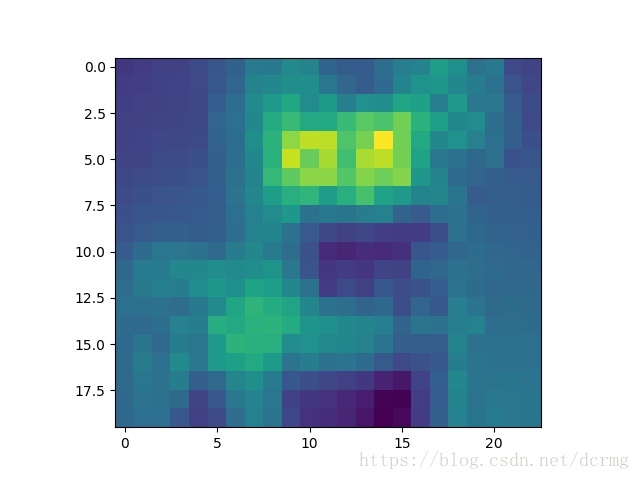
从不同层可视化出来的特征图大概可以总结出一点规律:
- 1. 浅层网络提取的是纹理、细节特征
- 2. 深层网络提取的是轮廓、形状、最强特征(如猫的眼睛区域)
- 3. 浅层网络包含更多的特征,也具备提取关键特征(如第一组特征图里的第4张特征图,提取出的是猫眼睛特征)的能力
- 4. 相对而言,层数越深,提取的特征越具有代表性
- 5. 图像的分辨率是越来越小的
VGG19网络特征可视化
代码:
# coding: utf-8
from keras.applications.vgg19 import VGG19
from keras.preprocessing import image
from keras.applications.vgg19 import preprocess_input
from keras.models import Model
import numpy as np
import matplotlib.pyplot as plt
from pylab import *
def get_row_col(num_pic):
squr = num_pic ** 0.5
row = round(squr)
col = row + 1 if squr - row > 0 else row
return row,col
def visualize_feature_map(img_batch):
feature_map = img_batch
print feature_map.shape
feature_map_combination=[]
plt.figure()
num_pic = feature_map.shape[2]
row,col = get_row_col(num_pic)
for i in range(0,num_pic):
feature_map_split=feature_map[:,:,i]
feature_map_combination.append(feature_map_split)
plt.subplot(row,col,i+1)
plt.imshow(feature_map_split)
axis('off')
plt.savefig('feature_map.jpg')
plt.show()
# 各个特征图按1:1 叠加
feature_map_sum = sum(ele for ele in feature_map_combination)
plt.imshow(feature_map_sum)
plt.savefig("feature_map_sum.jpg")
if __name__ == "__main__":
base_model = VGG19(weights='imagenet', include_top=False)
# model = Model(inputs=base_model.input, outputs=base_model.get_layer('block1_pool').output)
# model = Model(inputs=base_model.input, outputs=base_model.get_layer('block2_pool').output)
# model = Model(inputs=base_model.input, outputs=base_model.get_layer('block3_pool').output)
# model = Model(inputs=base_model.input, outputs=base_model.get_layer('block4_pool').output)
model = Model(inputs=base_model.input, outputs=base_model.get_layer('block5_pool').output)
img_path = '001.jpg'
img = image.load_img(img_path)
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
block_pool_features = model.predict(x)
print(block_pool_features.shape)
feature = block_pool_features.reshape(block_pool_features.shape[1:])
visualize_feature_map(feature)
从第一到第五层的特征图分别如下:
从第一层到第五层各特征图按1:1比例融合后特征依次为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号