Graph Plan
Graph Plan
一、结构
action-level i:在某个时间i可能执行的操作
state-level i:字面量在某个时间i为真
edges:先决条件和效果

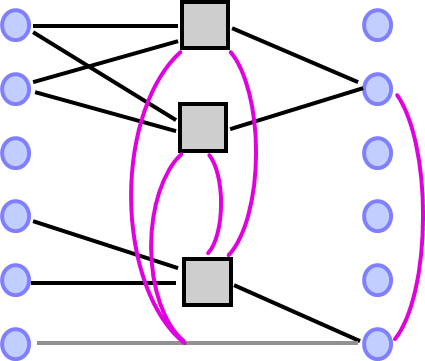
- 规划图是逐层构建的
- s0中的每一个字面量都被放入状态级别0,同时对不在s0中的每一个字面量进行否定
- 对于第i个操作级别包含所有操作的前提条件是状态级别i-1的子集
- 对于每个可能的字面量 I(构造了一个平凡算子),它是每个操作级别中唯一的条件和效果
- 第i级的状态级别都是第i级操作级别操作者的效果的联合
- 对于每个级别,维护冲突(互斥条件)
- 迭代继续,直到规划图稳定,即i+1中的操作级别和状态级别与第i次迭代相同
二、Mutex Condition
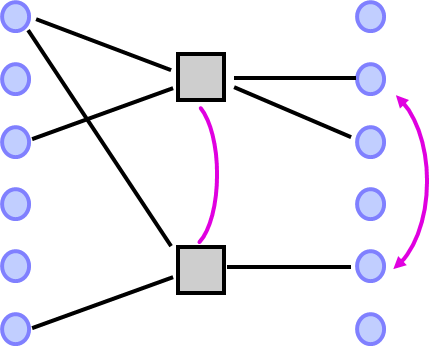
同一个操作级别上的两个操作是互斥的:
-
不一致效应:一种效应抵消另一种效应
-
干涉:一方删除另一方的先决条件
-
竞争需求:它们有相互排斥的先决条件
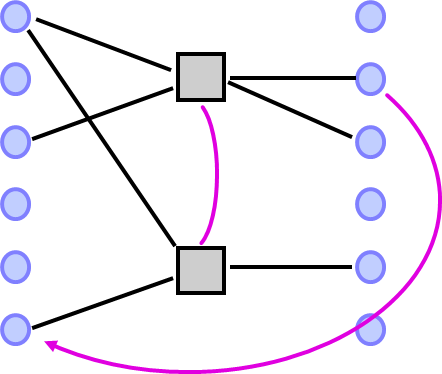
处于相同状态的两个字面量是互斥的:
- 不一致的支持:一个是对另一个的否定,或者实现它们的所有方法都是成对互斥的
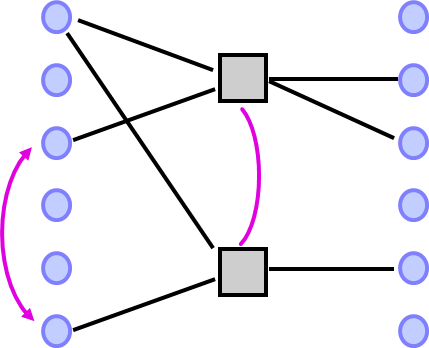
竞争需求和不一致的支持属于互斥锁的递归传播。
三、示例
Initial Conditions: (and
(garbage)
(cleanHands)
(quiet)
)
Goal: (and
(dinner)
(present)
(not (garbage)
)
Actions:
Cook :precondition (cleanHands)
:effect (dinner)
Wrap :precondition (quiet)
:effect (present)
Carry :precondition
:effect (and
(not (garbage))
(not (cleanHands)
)
Dolly :precondition
:effect (and
(not (garbage))
(not (quiet))
)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号