

---恢复内容开始---
本次试验学习和掌握zynq的emio的使用,是通过PS控制PL端的GPIO。 1、创建硬件工程,主要就是添加EMIO就可以。当然了创建工程的时候还要注意DDR的设置,根据自己板子的DDR设置相应的参数。依次设置如下参数:
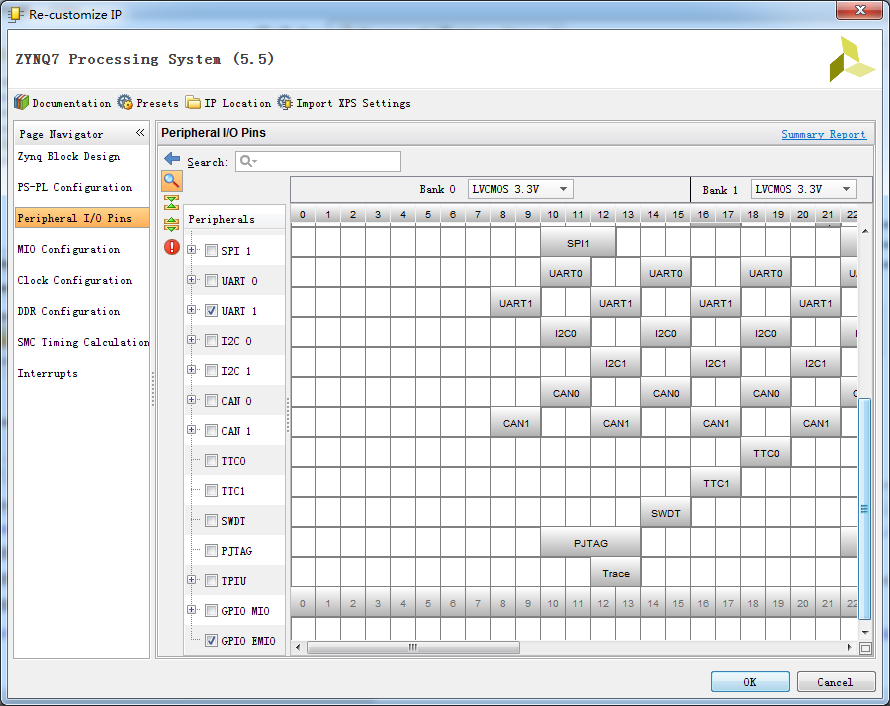
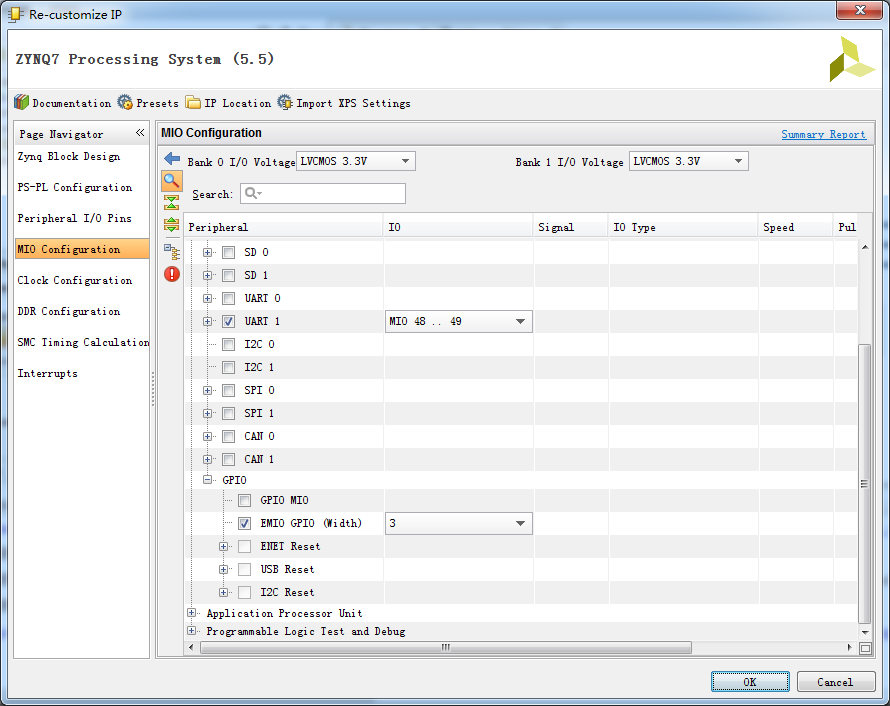
这里设置了3个EMIO口,最多可以设置成64个,具体看应用而定。
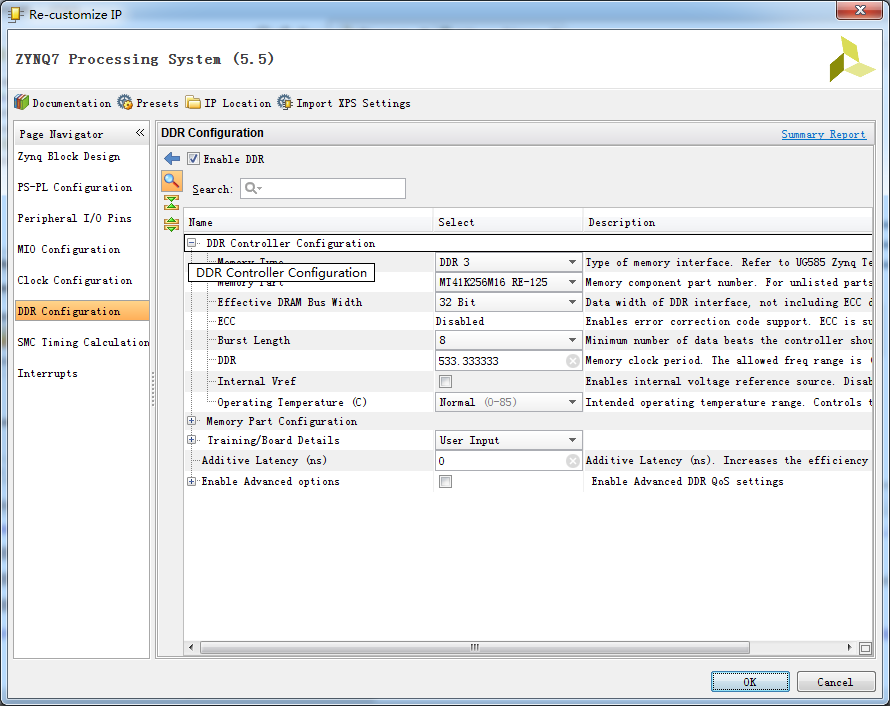
设置DDR3参数
2、既然是PL端,那就必需有管脚约束文件了,添加一个管脚约束文件。在管脚约束文件xdc中添加PL的管脚映射。
到这里就有个问题来了,什么知道管脚映射到哪里呢。不着急,打开刚刚生成的顶层文件,在这个顶层文件中可以看到刚刚引出的EMIO的对应GPIO

看到gpio_0_tri_io[0]、gpio_0_tri_io[1]、gpio_0_tri_io[2]就是对应的EMIO的GPIO口,就是要链到PL的硬件管脚上去。管脚约束文件如下:
set_property PACKAGE_PIN R14 [get_ports {gpio_0_tri_io[0]}]
set_property PACKAGE_PIN Y17 [get_ports {gpio_0_tri_io[1]}]
set_property PACKAGE_PIN Y16 [get_ports {gpio_0_tri_io[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_0_tri_io[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_0_tri_io[1]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_0_tri_io[0]}]
完成以上步骤就可以编译生成bit文件了,到这里硬件就创建完成了。
2、导入SDK工程文件,并创建一个APP工程。应用程序如下:
#include <stdio.h>
#include "xgpiops.h"
#include "sleep.h"
int main()
{
static XGpioPs psGpioInstancePtr;
XGpioPs_Config* GpioConfigPtr;
int iPinNumber= 54;
u32 uPinDirection = 0x1; //1表示输出,0表示输入
int xStatus;
//初始化
GpioConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
if(GpioConfigPtr == NULL)
return XST_FAILURE;
xStatus = XGpioPs_CfgInitialize(&psGpioInstancePtr,GpioConfigPtr, GpioConfigPtr->BaseAddr);
if(XST_SUCCESS != xStatus)
print(" PS GPIO INIT FAILED \n\r");
//配置IO
XGpioPs_SetDirectionPin(&psGpioInstancePtr, iPinNumber,uPinDirection);//配置IO为输出
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, iPinNumber,1);//配置IO的输出
while(1)
{
XGpioPs_WritePin(&psGpioInstancePtr, iPinNumber, 1);//输出1
sleep(1);//延时
XGpioPs_WritePin(&psGpioInstancePtr, iPinNumber, 0);//输出0
sleep(1);//延时
}
return 0;
}
下载到板子可以看到一个灯闪烁了。
问题又来了,int iPinNumber= 54; 为什么是54呢?因为PS端有了53的IO口,所以通过EMIO扩展的就从54开始,一定是从54开始的,如刚才设置了3个EMIO,那么这三个就对应54、55、56。在PL的顶层文件中有gpio_0_tri_io[0]、gpio_0_tri_io[1]、gpio_0_tri_io[2],那么对应的关系如下:
gpio_0_tri_io[0]->54
gpio_0_tri_io[1]->55
gpio_0_tri_io[2]->56
依次这样的对应关系。知道了这样的对应关系,就可以了自如的操作EMIO口了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号