摘要:  近期,海南大学生物医学工程学院脑机芯片神经工程团队在Frontiers in Neuroscience期刊上发表了题为《面向步态&神经电生理研究的非人灵长类模型与系统》的学术论文。海南大学生物医学工程学院梁丰研副教授为第一作者,殷明教授为通讯作者。海南大学为第一作者单位和通讯单位。 大脑皮层在运动控 阅读全文
近期,海南大学生物医学工程学院脑机芯片神经工程团队在Frontiers in Neuroscience期刊上发表了题为《面向步态&神经电生理研究的非人灵长类模型与系统》的学术论文。海南大学生物医学工程学院梁丰研副教授为第一作者,殷明教授为通讯作者。海南大学为第一作者单位和通讯单位。 大脑皮层在运动控 阅读全文
近期,海南大学生物医学工程学院脑机芯片神经工程团队在Frontiers in Neuroscience期刊上发表了题为《面向步态&神经电生理研究的非人灵长类模型与系统》的学术论文。海南大学生物医学工程学院梁丰研副教授为第一作者,殷明教授为通讯作者。海南大学为第一作者单位和通讯单位。 大脑皮层在运动控 阅读全文
posted @ 2023-06-08 11:27
您家豆子
阅读(208)
评论(0)
推荐(0)
 由香港理工大学主办的工业大数据与智能系统前沿会议将于2023年4月28日至5月1日在香港举行。届时来自海外、内地及香港的知名科学家将聚首,将围绕大会主题「面向人机共融的工业转型」发表演讲,分享他们的独到见解并探讨最新发展。 工业大数据与智能系统前沿会议是由中国国家自然科学基金会(NSFC)和香港联合
由香港理工大学主办的工业大数据与智能系统前沿会议将于2023年4月28日至5月1日在香港举行。届时来自海外、内地及香港的知名科学家将聚首,将围绕大会主题「面向人机共融的工业转型」发表演讲,分享他们的独到见解并探讨最新发展。 工业大数据与智能系统前沿会议是由中国国家自然科学基金会(NSFC)和香港联合 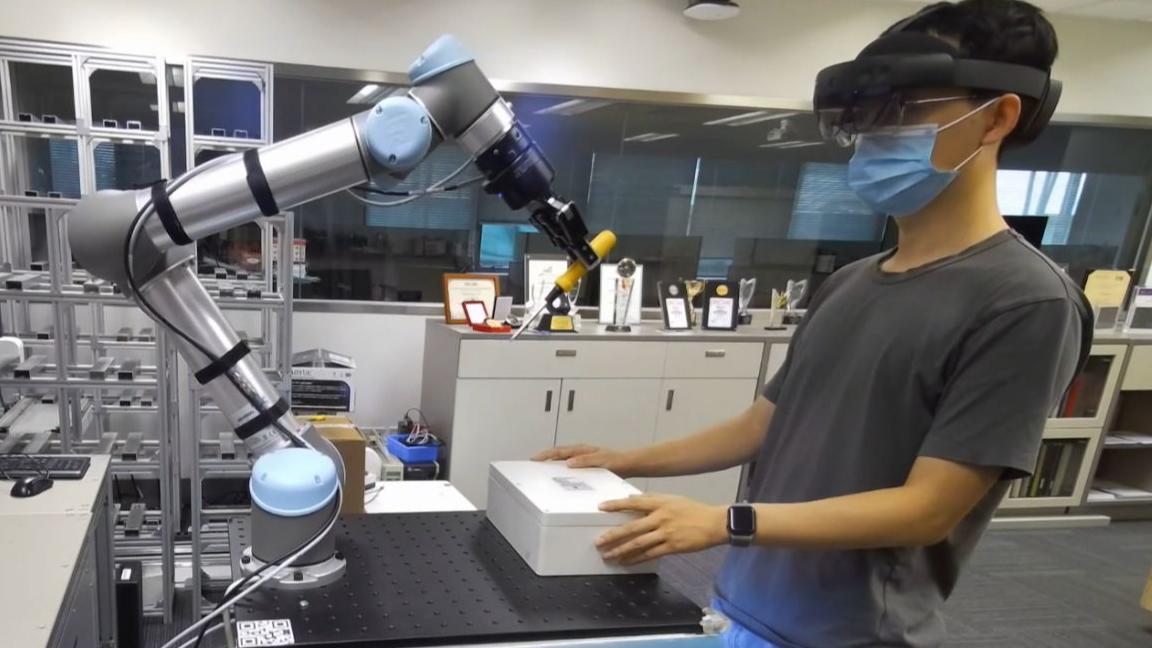 研究背景 废旧产品(end-of-life products)的拆卸是工程全生命周期管理的一个基本步骤。在减少资源消耗和温室气体排放的同时,回收可重复使用的部件可能创造相当的经济价值,同时也能推动碳中和目标的实现。 但目前EoL的拆卸仍然严重依赖人工操作,并且有毒材料可能对操作者构成潜在的安全威胁。
研究背景 废旧产品(end-of-life products)的拆卸是工程全生命周期管理的一个基本步骤。在减少资源消耗和温室气体排放的同时,回收可重复使用的部件可能创造相当的经济价值,同时也能推动碳中和目标的实现。 但目前EoL的拆卸仍然严重依赖人工操作,并且有毒材料可能对操作者构成潜在的安全威胁。  “数字孪生”就是“数字的双胞胎”,物理实体、虚拟模型、数据、连接和服务是数字孪生的核心。数字孪生作为实现虚实之间双向映射、动态交互、实时连接的关键途径,为观察、认识、理解、控制和改造物理世界提供了一种新的有效手段。成熟的数字孪生场景能帮助客户用较小的成本预知最终结果,避免较大损失。 《“十四五”信息
“数字孪生”就是“数字的双胞胎”,物理实体、虚拟模型、数据、连接和服务是数字孪生的核心。数字孪生作为实现虚实之间双向映射、动态交互、实时连接的关键途径,为观察、认识、理解、控制和改造物理世界提供了一种新的有效手段。成熟的数字孪生场景能帮助客户用较小的成本预知最终结果,避免较大损失。 《“十四五”信息  浙公网安备 33010602011771号
浙公网安备 33010602011771号