一种工业机器人绝对精度的提升方法
摘要:一种新的校准方法,使用动作捕捉作为测量工具,利用ELM神经网络作为非几何误差源补偿,提升工业机器人的绝对精度。
同济大学航力学院的研究人员提出了一种新的标定方法,利用运动捕捉系统和人工神经网络(ELM)来增加工业机器人的绝对精度。所提出的方法与传统校准方法相比,在姿态精度方面可以实现较大改进。研究为改善工业机器人在各个领域中的性能和效率提供了新途径。
验证实验
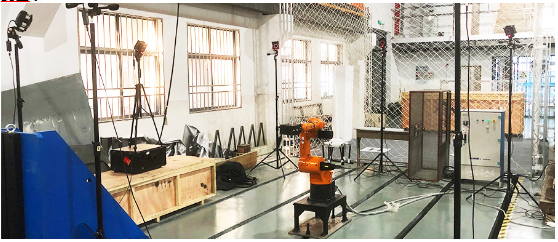
将机器人布置在8台动作捕捉镜头的几何中心。用螺栓将一个铝制空心装置固定在末端执行器上,在机器人的每个关节点和末端执行器上布置约15个反光标识点,共90个。实验过程中,随机选择机器人的500个位姿动作作为研究对象。使用NOKOV度量运动捕捉系统测量机器人的连续运动状态,获得机器人各个关节的位置和姿态信息,并用于后续的DH参数校准。最后使用标准差的范数评估了标定方法,并将其与传统和改进的运动学校准方法进行了比较。
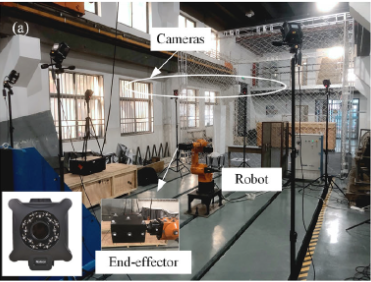
实验机器人和动作捕捉系统
实验结果表明,随着几何误差和非几何误差等来源的增加,定位精度从定位精度由3.073度提高到0.077度。证实了算法的有效性,验证了预期结果。
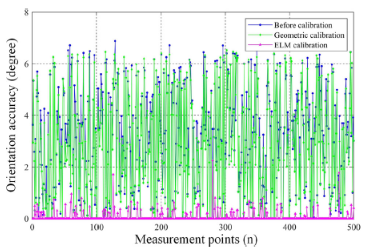
实验中的定位精度
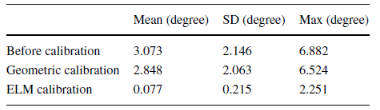
机器人在实验中的定位误差
参考文献:Tianchi Gao, Fan Meng, Xiaoyu Zhang, Zhicheng Tian1, Hanwen Song, An operational calibration approach of industrial robots througha motion capture system and an artificial neural network ELM, [J/OL]The International Journal of Advanced Manufacturing Technology, DOI:10.1007/s00170-023-10856-w
原文链接:https://doi.org/10.1007/s00170-023-10856-w
想要了解更多动作捕捉相关信息,可点击NOKOV度量动作捕捉官网

 浙公网安备 33010602011771号
浙公网安备 33010602011771号