脑机接口 | 面向步态&神经电生理研究的非人灵长类模型与系统
近期,海南大学生物医学工程学院脑机芯片神经工程团队在Frontiers in Neuroscience期刊上发表了题为《面向步态&神经电生理研究的非人灵长类模型与系统》的学术论文。海南大学生物医学工程学院梁丰研副教授为第一作者,殷明教授为通讯作者。海南大学为第一作者单位和通讯单位。
大脑皮层在运动控制中的神经机制一直是神经科学研究的关注点,但是目前的理解尚不深入。“运动皮层编码的是肌肉活动还是运动参数?”、“如何进行编码?”——自一百多年前运动皮层被发现以来,有关运动皮层在身体运动控制中作用机制的争论持续至今,仍无法达成广泛共识。
步行是人类主要的运动,是基本日常生活能力之一。多种神经系统疾病患者如脑卒中、帕金森综合征、多发性硬化等往往存在步态异常。
1
理解步态的神经机制有助于了解步态异常相关神经系统疾病的神经生理学基础,掌握疾病的发生、进展过程,进行相应的诊断、康复与治疗。
2
理解步态的神经机制有助于为神经假体(Neuroprosthesis,如智能假肢)、康复机器人(如下肢外骨骼机器人)、仿生机器人(如双足机器人、四足机器人)的精准控制提供关键的神经生理基础。
脑机接口(BCI)近年来得到了广泛的关注并且成为帮助瘫痪患者修复运动功能、触觉、文字输入能力(图1/2)。在应用于人之前,临床BCI需要严格的确认和验证(V&V)。由于非人灵长类动物与人类的接近性,它们通常被认为是神经科学研究(包括BCI的确认和验证)的最后并且广泛使用的动物模型。
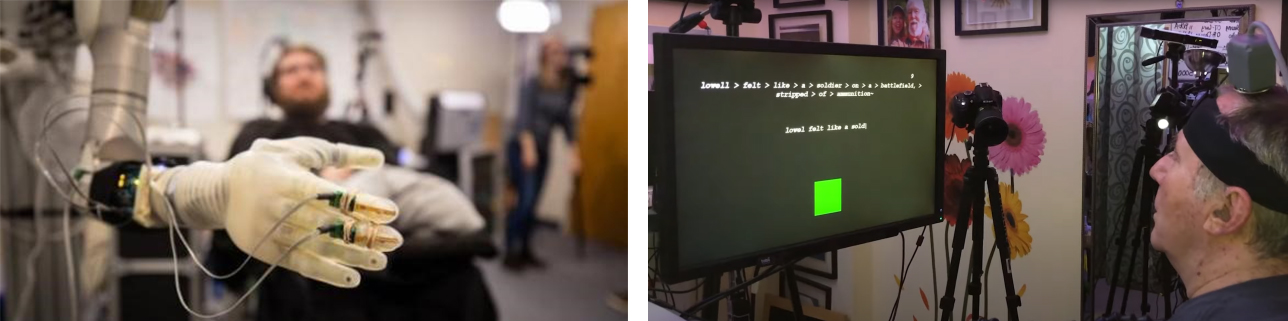
图1 植入式脑机接口帮助瘫痪患者:(a)有触觉地控制机械臂;(b)想象手写文字进行打字
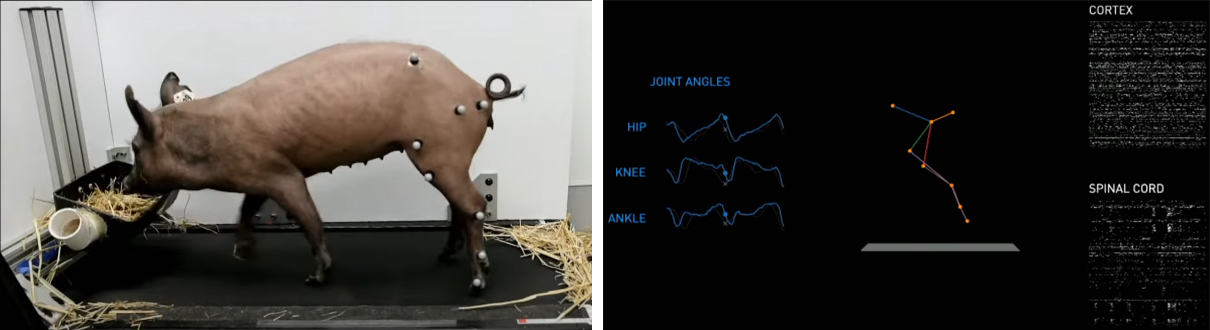
图2 马斯克的Neuralink正在开展的步态神经学研究.:(a)植入脑机接口的实验猪被贴上运动捕捉系统的反光球; (b)同步获取运动学数据、皮层与脊髓神经元数据;
由于技术限制,过去的动物BCI研究大多数使用有线的神经记录系统以获取神经电生理数据。然而,面向非人灵长类的无线神经记录系统(植入式脑机接口)使得研究猕猴步态的神经学研究成为可能,但也产生了许多技术方面的挑战,仍待解决:如信号质量、数据通量、传输距离、设备尺寸、供能限制等等。
另外,高时空精度的运动捕捉系统在脑机接口&步态中也十分重要。但是,目前的研究主要依赖于基于图像处理的运动捕捉系统,准确度不够。
理解运动皮层在运动过程中的作用一直是过去几十年的主要研究重点。但目前尚不清楚,还需要进一步探索。关于运动的神经控制有两种主要观点(Shenoy et al.,2013)。一方面,一些人认为,运动皮层编码了更高阶的运动参数,如末端效应器的位置;另一方面,运动皮层被认为编码了肌肉动作。在NHP手臂运动中,一群皮层神经元被发现与运动方向密切相关(Georgopoulos et al.,1986)。Wessberg et al. (2000) 支持这一发现,并使用一群皮层神经元来控制假肢。在此之后,数十种方法被提出来来解码或建模运动功能和记录的神经活动之间的关系,包括线性维纳滤波器(Wessberg et al., 2000; Carmena et al., 2003),主成分分析(PCA, Churchland et al., 2012),卡尔曼滤波器(Wu et al., 2002; Li et al., 2009)和长短期记忆神经网络(LSTM,一种常用的递归神经网络,Tseng et al., 2019; Glaser et al., 2020)。
然而,步行运动在自主性方面不同于手臂运动。研究发现,运动皮层对步行运动和手臂伸展运动的贡献是不同的(Xing et al.,2019)。Drew(1988)发现,猫在四足行走时,运动皮层神经元会调节屈肌。2017年,最近一项小鼠模型的研究发现,运动皮层输出在跑步机行走中的作用与伸手运动中显著不同(Miri et al.,2017)然而,Yakovenko and Drew (2015)却提出,猫的运动皮层在伸展和行走运动中起着类似的作用。这些相互矛盾的结论表明,由于缺少来自NHP模型的证据,在理解运动皮层在步行运动过程中的作用方面仍存在认知缺口。
由于目前运动皮层在步态中的作用仍不清晰并值得深入研究,未来的脑机接口&步态研究需要同步、高速、高精度地获取神经信号与运动学信号。因此,海南大学“脑机芯片神经工程”团队基于高精度的红外运动捕捉系统(Nokov度量, Mars 4H)、无线植入式脑机接口系统搭建了自由运动猕猴步态实验平台研究平台。

图3 自由运动猕猴步态实验平
自由运动猕猴步态实验平台由红外运动捕捉系统、无线神经记录系统、无线肌电采集系统、三维测力跑步机组成,同时采集皮层神经元电信号、EMG、关节力矩、运动学参数。可用于研究皮层在步态调控的编码信息种类。(图片欢迎引用,请引用本论文)
海南大学生物医学工程学院“脑机芯片神经工程”团队负责人殷明教授拥有多年国内外脑机接口技术经验,长期从事神经信号记录与刺激相关的器件开发,前后研发近 20种神经记录与刺激芯片,拥有丰富的植入式器件设计、测试和封装经验。团队自主研发了256通道无线前置放大器,并研发有仿生假肢手、康复外骨骼手,合作开发了下肢外骨骼机器人与动力型膝上、膝下假肢。团队与医院康复科合作,配备有“鼠-猴-健康人/患者”全系列的运动捕捉综合实验平台。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号