
动作捕捉技术应用于地面移动机器人协同

图1 医院中搬运病人用的床单
如何能够让软布更加智能地参与到搬运任务中,使其成为一块神奇的魔毯?上海交通大学机械与动力工程学院熊振华教授课题组与新泽西州立罗格斯大学(Rutgers University)机械与航空航天工程学院易劲刚教授合作,将多移动机器人应用于软布的支撑与操纵中,实现了多移动机器人协同操纵软布搬运物体的任务。
该任务的核心难点是如何构建多机编队-软布-被搬运物系统(以下简称多机搬运系统)的模型。研究人员提出了一种可以实时计算的模型,即虚拟可变绳索模型(Virtual Variable Cables Model, VVCM),其简化了的多机搬运系统的复杂度。基于VVCM,研究人员进一步提出了多机搬运系统的运动规划器,从而可以在三维杂乱的环境中运输物体。研究人员使用了NOKOV度量科技公司的动作捕捉系统搭建了三机器人实验平台(如图2所示),将实时获取的被搬运物体位置与VVCM计算所得的物体位置比较,验证了模型的有效性并实现了三机器人系统搬运实验。
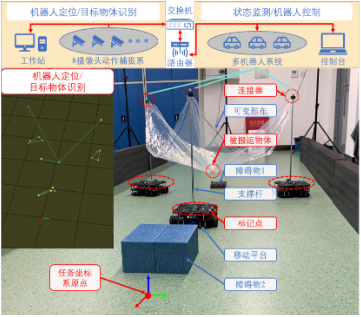
图2 多移动机器人运输系统的实验装置和通信网络,采用NOKOV运动捕捉系统进行模型准确性检测。
如图3所示,实验的场景为设有障碍物的走廊环境,三机器人编队通过调整队形操纵被搬运物体跨越两个不同的障碍物。其中,黑色的障碍物由于尺寸和高度较小,多机编队无需改变队形即可轻松跨越,而对于蓝色的大尺寸障碍物,多机编队改变了队形大小,将被搬运物体抬升至安全高度,从而顺利跨越该障碍物。而这种跨越障碍物的能力也是本研究提出的创新点之一。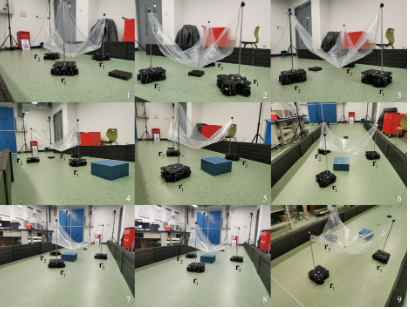
图3 3机器人编队运输载有台球的可变形布。 机器人编队的轨迹上放置了两个不同高度的障碍物。
研究人员也在实验过程中记录了被搬运物体的实时位置,如图4所示,并与VVCM计算所得到的位置相比较,结果显示VVCM模型具有较高的精度,为多机通过可变物体操纵被搬运物提供了良好的模型支撑,相关仿真和实验效果见论文附带的视频材料。
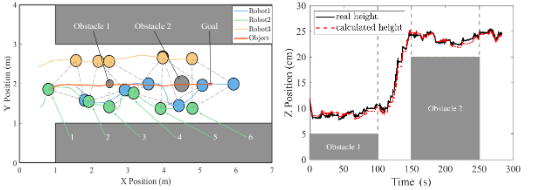
图4 三机器人团队运输的物体的实验结果。(a)三个机器人和物体的轨迹。机器人目标(终点)由红色星形标记表示。(b)物体在运输过程中的高度轨迹![]() 。
。
该成果发表于机器人领域知名期刊IEEE ROBOTICS AND AUTOMATION LETTERS (RA-L),上海交通大学博士研究生胡家玮为论文的第一作者,上海交通大学熊振华教授和Rutgers University易劲刚教授为论文的通讯作者。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号