头部扫描仪的定位追踪-西安交通大学生命学院
随着社会日益发展,生活节奏越来越快,压力越来越大,就医患者数量增多,医疗资源紧张已经成了社会问题。为了更高效的完成脑部扫描检查,使患者更快速的了解自己身体情况,更为了促进技术医疗,智能医疗的推广应用,西安交通大学生命学院开始了一项针对机器人自动扫描检测人体头部的研究
定位系统的选择
本次研究旨在通过定位系统在模拟空间获得患者,机械臂,扫描仪的具体位置,经由空间算法变换,将位置信息传给机械臂,控制扫描仪进行精准的头部扫描检查。由于病患检查种类复杂多样,西安交通大学生命学院经过多方比较,决定使用光学定位系统。随后便确认使用NOKOV度量光学三维动作捕捉系统用于研究。
自助头部扫描的实现
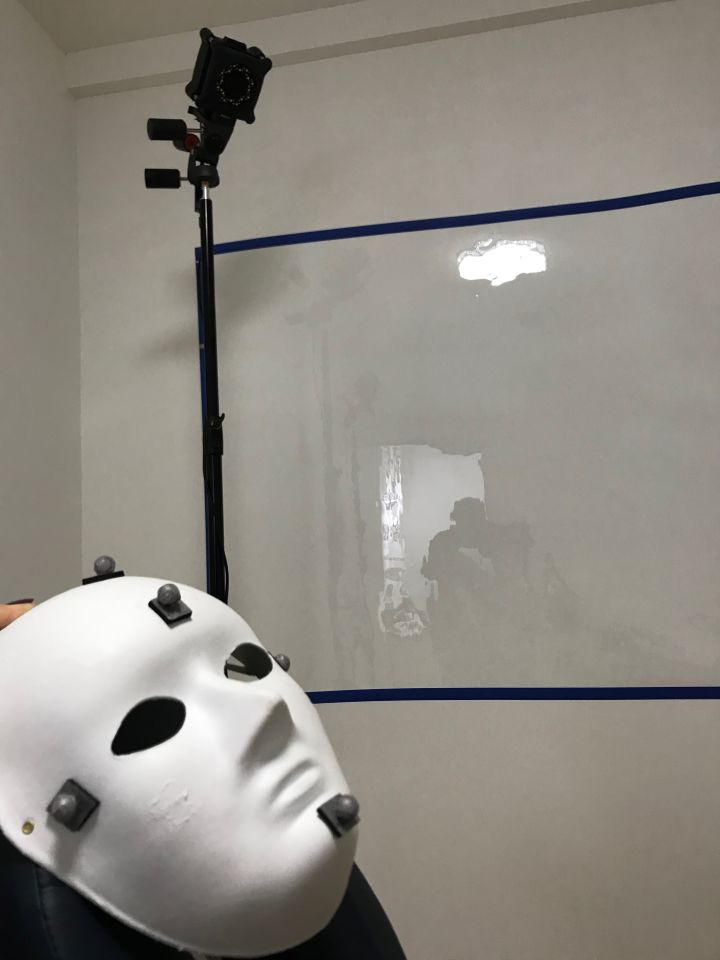
现场通过三脚架在室内完成系统的搭建,并根据实际检查室情况对动作捕捉定位系统进行调试。完成整个系统的标定校准后,我们在这个只有12平的检查室建立起一个有机械臂、3D扫描设备、患者和光学定位的空间交互系统。在此空间,将NOKOV(度量)光学三维动作捕捉系统通过患者身体和扫描设备上的反光标志点采集到的位置数据,经由高效的空间算法转换,获得模拟空间中患者所在的位置,再将患者的位置实时传送到动作捕捉数据处理系统。通过动作捕捉数据处理系统可以获得相应设备的姿态位置,准确报出需诊断部位的位置信息,以此调整扫描设备实现精确扫描。数据处理系统可同时接收患者诊断方案的信息,将诊断方案转变成指令用于控制机械臂的运动,实现多设备交互诊断,并通过患者的诊断部位,调节扫描仪的检测频率、强度以及时间。整个系统可以完成自助高效患者检查。

动作捕捉现场图片
有了精确定位,西安交通大学生命学院将患者头部扫描这个项目顺利向前推进,并旨在落地施行,为更多的病患提供高效便捷的服务。
更多相关案例及动作捕捉资讯,请关注服务号【NOKOV度量科技】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号