仿生机器人研究
仿生机器人是指依据仿生学原理,模仿生物结构、运动特性等设计的机电系统,已逐渐在反恐防爆、太空探索、抢险救灾等不适合由人来承担任务的环境中凸显出良好的应用前景。
研制仿生机器人的灵感来源于自然界中的动物,比如蜥蜴是有着优秀运动能力的爬行动物,能够在断壁残垣中自由穿行,对蜥蜴爬行动作的研究可为仿生救灾机器人的研究提供理论基础。

根据仿生学的主要研究方法,需要先研究生物原型,将生物原型的特征点进行提取和数学分析,获取运动数据,建立运动学和动力学计算模型,最后完成机器人的机械结构与控制系统设计。

吉林大学威海仿生研究院的研究人员在进行生物原型研究及数学建模时,需要观察蜥蜴运动时的姿态,为此他们在蜥蜴的身体及四肢的粘贴反光标记点,使用NOKOV(度量)光学三维动作捕捉镜头捕捉标志点并获取各点空间坐标。依赖于动作捕捉系统强大的数据处理功能,可通过后处理模块计算出蜥蜴足端与脊椎的三维运动轨迹、运动时身体的摆动角度、运动的速度与加速度。
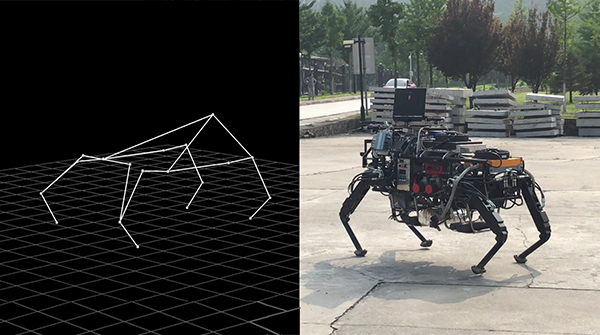
NOKOV度量动作捕捉的采集频率可达到380Hz,保证采集的运动数据不会失真。利用这些生物原型的特征点信息,研究者可建立蜥蜴运动的计算模型,从而为仿生机器人设计制造提供理论基础。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号