论文阅读笔记_008 Bayesian Optimisation for Intelligent Environmental Monitoring
前言
本文介绍了如何利用贝叶斯优化 构建合理的环境监测传感器网络 以及如何利用贝叶斯优化使机器人进行环境探索。
环境监测传感器网络布置与机器人环境探索的共同点在于采样
- 如何用更少的传感器构建更接近真实的环境模型?
- 如何用更少的探索动作构建更完整的地图?
论文研究内容介绍
Bayesian Optimisation 的步骤如下图所示:
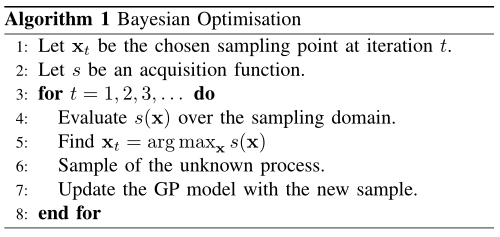
首先,通过高斯过程构建先验环境模型 ,然后根据环境模型构建采集函数(Acquisition Function)
,然后根据环境模型构建采集函数(Acquisition Function) ;获取优化结果作为下一步状态目标;状态更新获得测量再利用高斯过程更新环境模型。多次迭代后可以得到一个较为精准的环境模型
;获取优化结果作为下一步状态目标;状态更新获得测量再利用高斯过程更新环境模型。多次迭代后可以得到一个较为精准的环境模型 。$\mu $
。$\mu $
可以看出算法的关键在于采集函数 的设置,常用的采集函数为 Upper Confidence Bound (UCB):
的设置,常用的采集函数为 Upper Confidence Bound (UCB):

其中参数 大的时候采集函数输出偏向探索,
大的时候采集函数输出偏向探索, 小的时候采集函数输出偏向利用(回环)。
小的时候采集函数输出偏向利用(回环)。
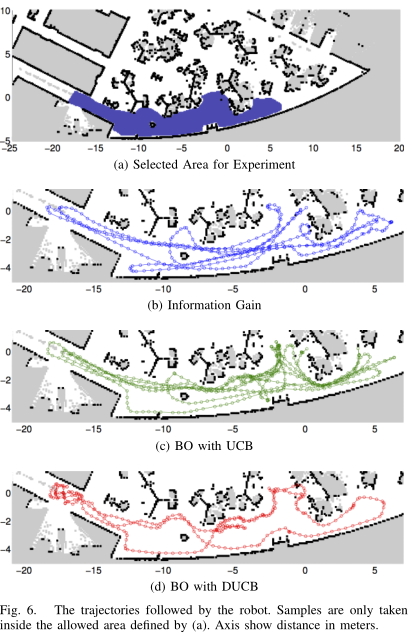
论文中提出了一种考虑距离信息的采样函数 Distance-based Upper Confidence Bound (DUCB)

实验部分
实验部分有两点我觉得可以借鉴的地方:
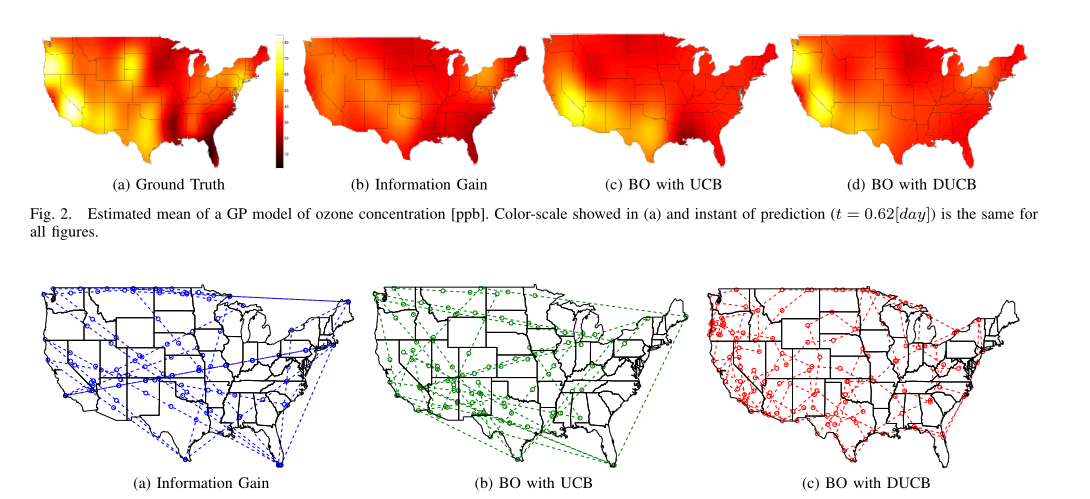
(1)在对比臭氧浓度结果时作者提出加权均方根误差(Weighted Root Mean Squared Error, WRMSE)来代替均方根误差(Root Mean Squared Error, RMSE)巧妙的将论文方法的弱点变成的优点
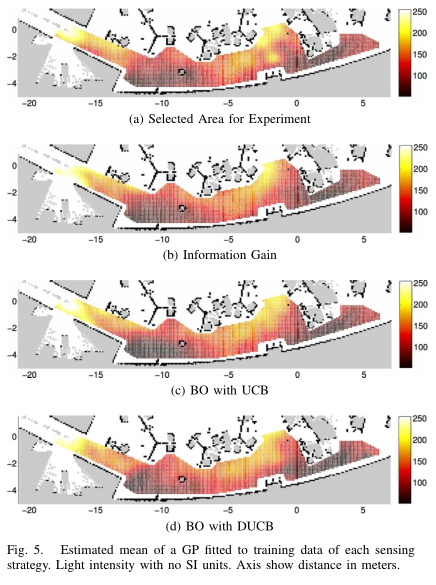
(2)在室内实验部分,利用小车调查室内光强时获取GT的方式可以借鉴:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号