论文阅读笔记_005 Generalized ICP
一、前言
Robotics science and system 会议论文 作者是斯坦福大学的 Aleksandr V. Segal、Dirk Haehnel、Sebastian Thrun。
本文首先介绍了ICP和point to plane 方法,然后引出了Generalized ICP方法
二、ICP原理简介
标准的ICP算法可以分成两步:
- 确定两组点云之间的点的对应关系;
- 计算能够使具有对应关系的点对距离最小的Transformation。
通过两步之间的不断迭代可以使得到两组点云之间的变换逐渐收敛。由于两次测量(scan)中仅有部分重叠区域,作者提出可以通过添加最大匹配阈值 (距离)解决此问题。
(距离)解决此问题。 代表了收敛性和准确性之间的一种权衡。
代表了收敛性和准确性之间的一种权衡。
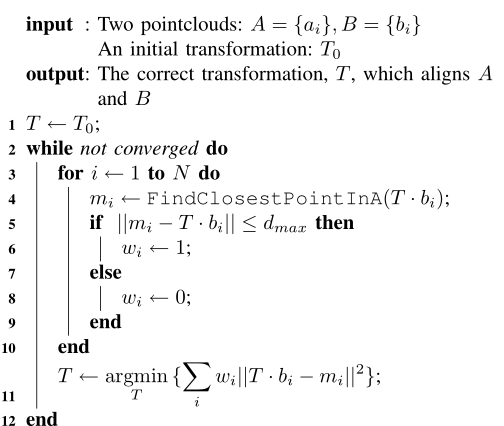
图1 标准ICP算法
三、 Point-to-plane 方法简介
Point-to-plane是一种ICP变体通过利用曲面法线信息来提高性能(单从描述上看我还没看出来如何提高性能?难道收敛变快了?不会吧?),此方法与标准ICP方法的不同之处在于算法的第11行替换为:

其中, 是点
是点 处的法向量
处的法向量
四、GICP方法介绍
GICP方法同样是针对图1中算法的第11行进行修改,在其中附加了一个概率模型。设有两组点云按照编号一一对应 ,
, 可以根据测量模型认为
可以根据测量模型认为 ,
, ,则有
,则有

令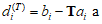 ,则其分布如下:
,则其分布如下:

然后,可以利用极大似然估计的方法计算 :
:
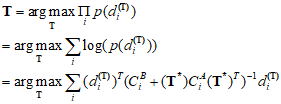
把ICP问题这样建模以后, 和
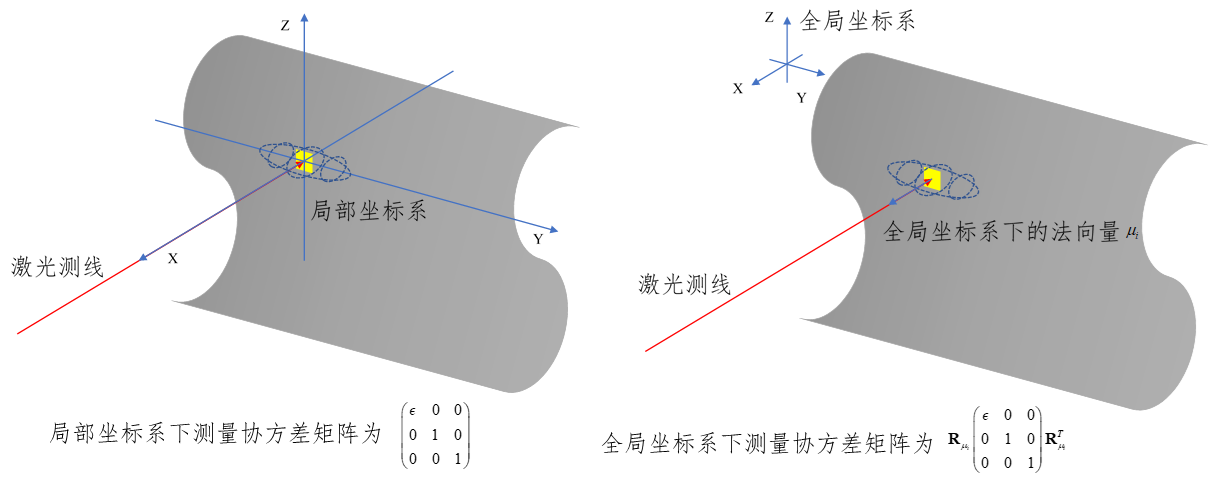
和 的选择就成为了一个需要考虑的问题。其选取如下图所示,作者认为在测点的不确定性主要体现在切平面上因此,
的选择就成为了一个需要考虑的问题。其选取如下图所示,作者认为在测点的不确定性主要体现在切平面上因此,
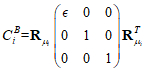
其中, 为极小值。
为极小值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号