论文阅读笔记_004 Sonar image registration for swarm AUVs navigation: Results from SWARMs project
论文阅读笔记_004 Sonar image registration for swarm AUVs navigation: Results from SWARMs project
博客中存在个人理解,如有疏漏,欢迎留言探讨。
0 前言
实验室这几天的网络一直有问题,导致很多工作开展不了。不过这样也好静下心多看看论文。
作者来自法国ECA Robotics和IRENav,Ecole Navale,France.(船舶学校(布雷斯特)创办于1827年,坐落于布列塔尼大区)。本文是欧洲SWARMS(Smart and Networking Underwater Robots in Cooperation Meshes, SWARMS)项目的一部分,目标是通过多传感器图像配准来辅助AUV定位。主要任务有两个路标检测和路标识别。本文算法仅针对侧扫声纳进行了研究。
期刊名 Journal of Computational Science 2020年影响因子/JCR分区:2.644/Q2
1 研究目的
在SWARMS项目中所用多机器人集群策略stigmergy中,首先第一个AUV负责给后续的AUV提供信息(如,地图、路标等),然后AUV之间通过信息交互并对彼此信息进行融合,最终形成对环境的认知。针对化学污染、羽流探测、检查和跟踪、护堤建设或海床测绘等任务,可以首先通过AUV集群进行全面调查,再派出单个AUV对目标区域进行更仔细的调查。本研究的最终目的是提出适用于AUV集群的多传感器图像配准辅助定位方法。(因为作者认为SLAM方法更适合单个AUV作业,针对携带不同传感器的AUV集群来说,如何从多源图像检测出同一目标是问题的关键)。
2 主要方法介绍
在本文中作者只针对侧扫声纳图像进行了研究。
2.1 一种阴影提取耦合专家规则的特征点提取方法
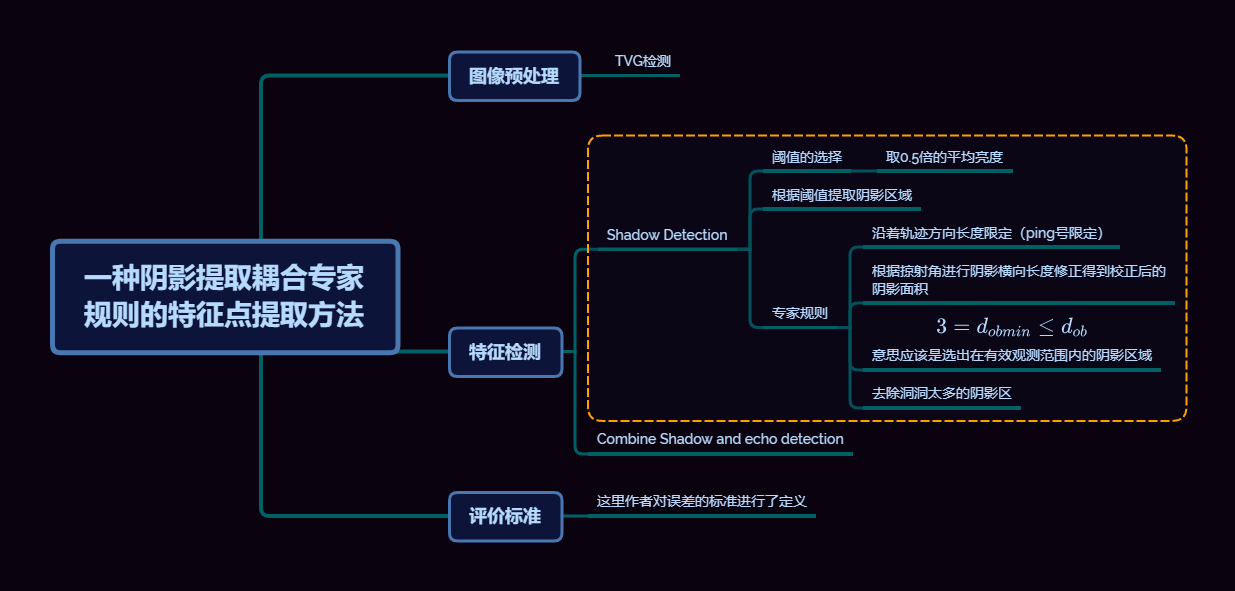
- (1)根据到声呐距离计算所有测点的平均亮度
- (2)中值滤波
- (3)For each ping, division member by member of the samples by the curve。(这句是原文,没理解什么意思)
图像与处理之后就是特征的检测,常用的方法由基于阴影区域的特征检测方法和阴影与回声混合的特征检测方法两大类。在SWARMs中,海底相对简单(平坦沉积物),因此可以使用阴影阈值算法检测目标。再使用专家规则进行增强(用于去除错误目标)
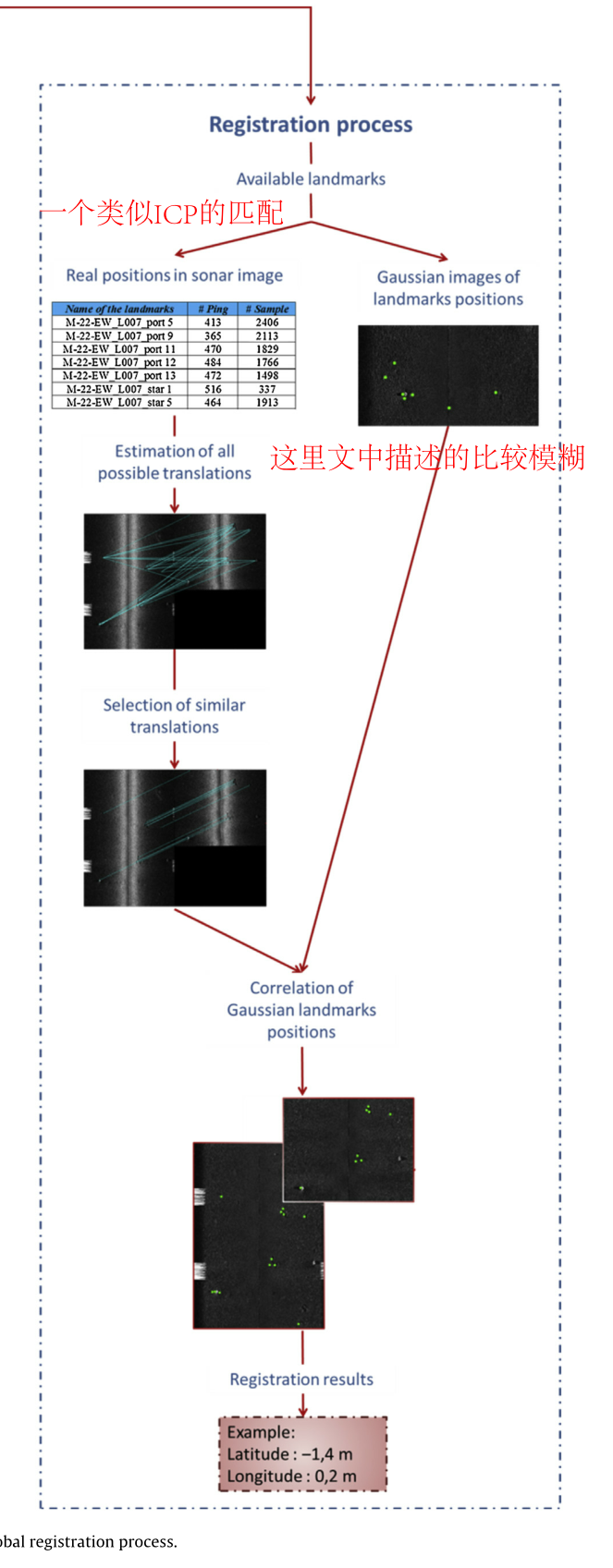
2.2 特征点快速搜索+匹配确认方法
3 一些个人看法
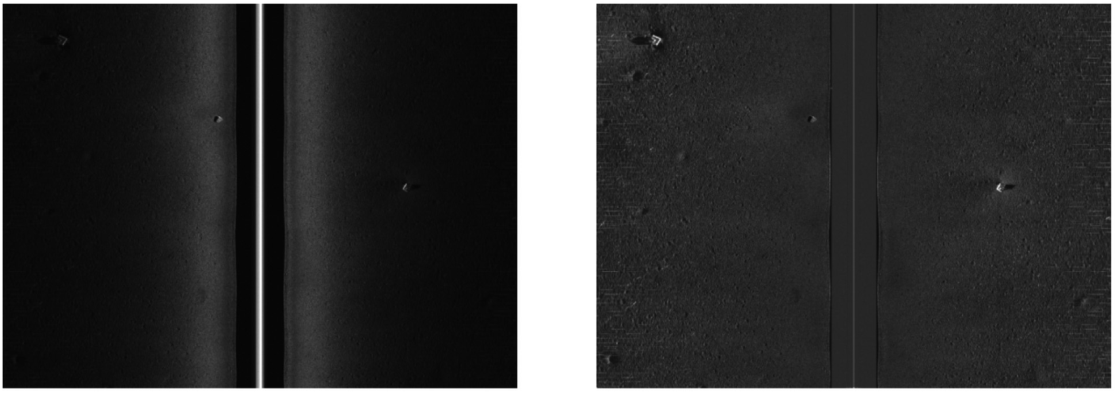
时变增益矫正会导致原始侧扫图像中包含的距离信息损失,但是使图像的纹理信息得到了增强。
