论文阅读笔记_003 AUV -Based Underwater 3-D Point Cloud Generation Using Acoustic Lens-Based Multibeam Sonar
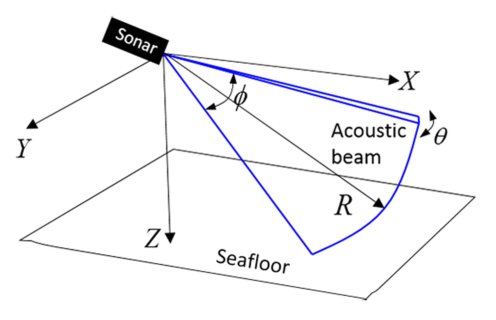
前视声纳成像原理
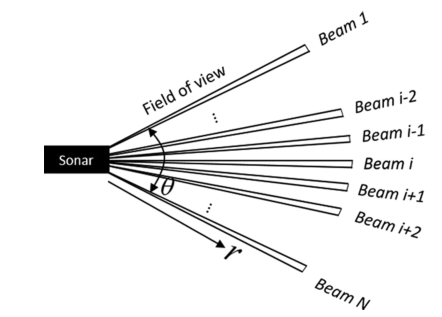
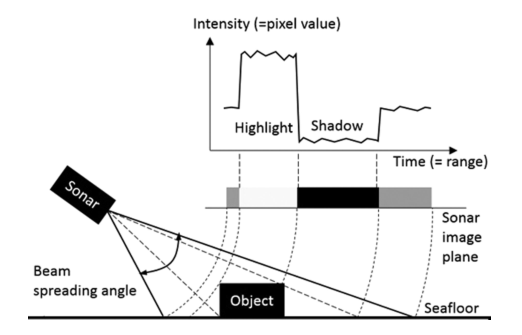
前视声纳的波束结构如下图所示,通过对时间进行采样能够得到距换能器固定半径下回波强度之和。如下图三所示当固定半径上障碍多时相应的声纳图像对应像素值就越大。
 (a)
(a)
 (b)
(b)
 (c)
(c)
假设时间采样次数为\(M\),前视声纳波束数为\(N\),就可以生成一个大小为\(M \times N\)的声纳图像。相应的该图像也可以更直观的用极坐标的方式表示,如下,
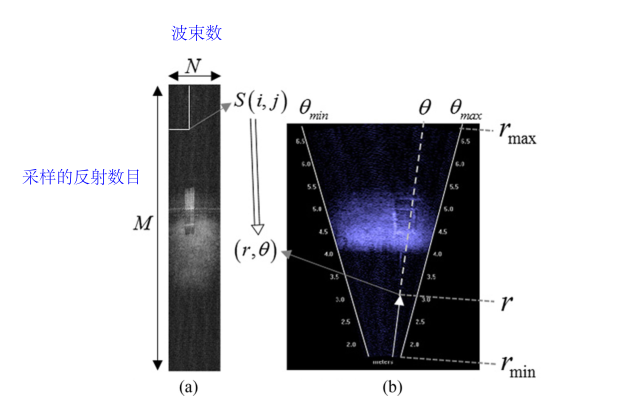
设\(M \times N\)图像像素索引为\((i,j)\),极坐标索引为\((r,/theta)\),二者转换关系如下,
\[ r=r_{min} + \epsilon_{r}(i-0.5) \\
\theta=\theta_{min} + \epsilon_{\theta}(j-0.5) \\
\epsilon_{r} = \frac{r_{max}-r_{min}}{M} \\
\epsilon_{\theta} = \frac{\theta_{max}-\theta_{min}}{N}
\]
