G2O initial guess 方法的选择
G2O initial guess 方法的选择
〇、前言
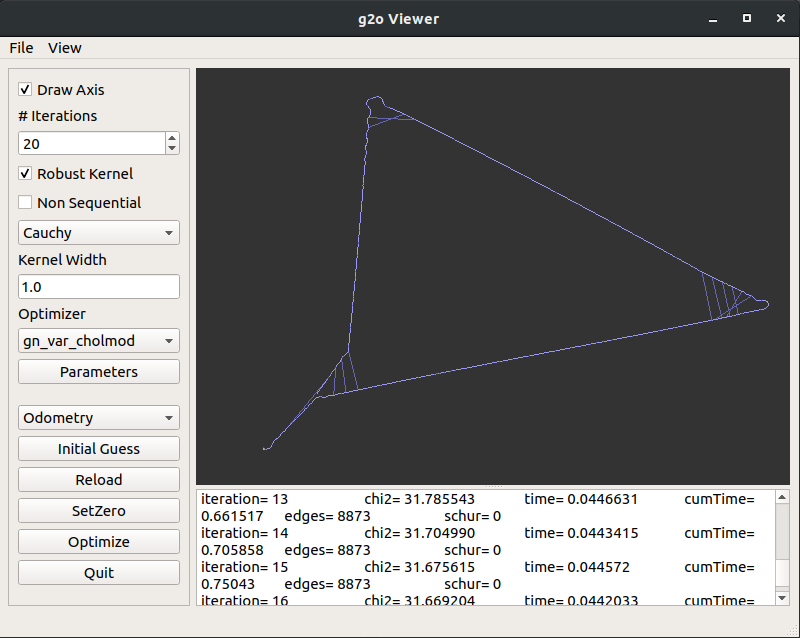
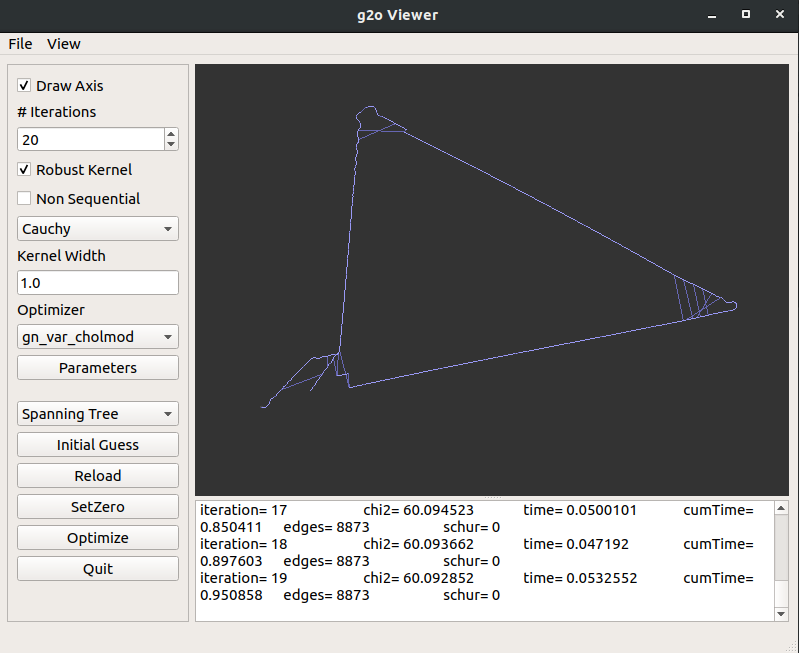
由于不同优化初始化方法会对g2o的结果产生影响,如下图所示,在勾选Robust Kernel的条件下:using initial guess from spanning tree 和 using initial guess from odometry 在其他设置相同的情况下得到的优化结果差别很大。因此我们希望可以通过程序来选择合适的优化初值设置方法。
PS:这里产生差异的原因和是否勾选Non Sequential也相关,用spanning tree初始化时若勾选Non Sequential会得到与左图相同的结果,而No Sequential的意思是只把回环边设置为鲁棒核
一、查看对应源码
由于没有搜索到相关资料,所以最好的方式就是查看g2o_viewer的源码。(同样的事已经做过一次,只是记性不好,这也是写这篇博客的原因)。
首先通过QT Designer查到对应下拉框的名字叫cbxIniitialGuessMethod,按钮btnInitialGuess
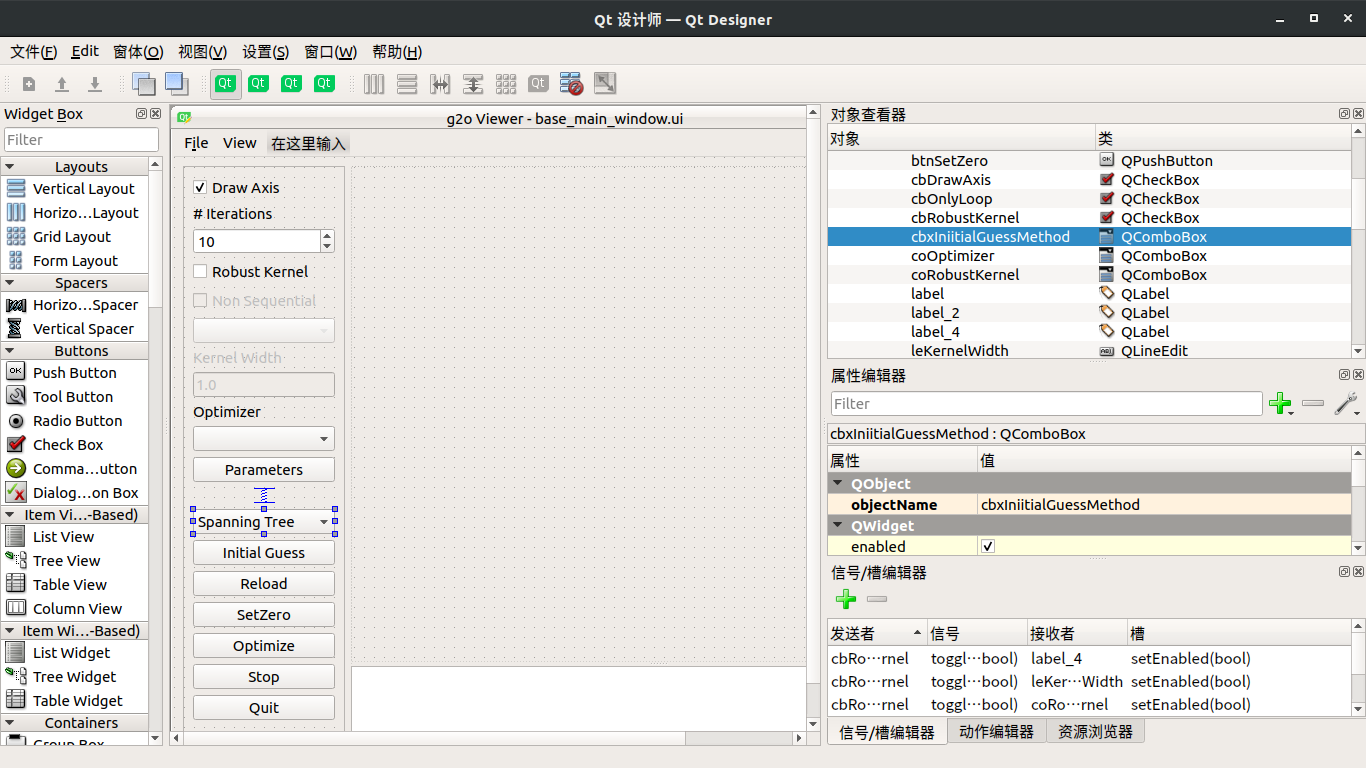
再找到对应的响应函数,然后就是我们需要的代码。
void MainWindow::on_btnInitialGuess_clicked()
{
if (viewer->graph->activeEdges().size() == 0)
viewer->graph->initializeOptimization();
switch (cbxIniitialGuessMethod->currentIndex()) {
case 0:
// spanning tree
viewer->graph->computeInitialGuess();
break;
case 1:
// odometry
{
EstimatePropagatorCostOdometry costFunction(viewer->graph);
viewer->graph->computeInitialGuess(costFunction);
}
break;
default:
cerr << __PRETTY_FUNCTION__ << " Unknown initialization method" << endl;
break;
}
viewer->setUpdateDisplay(true);
viewer->update();
}
二、编程验证
2.1 g2o_test.cpp
#include <iostream>
#include <fstream>
#include <stdio.h>
#include <vector>
#include <numeric>
#include <sstream>
//用于构建和计算图优化 g2o
#include <g2o/types/slam3d/types_slam3d.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <g2o/solvers/cholmod/linear_solver_cholmod.h>
#include <g2o/types/slam3d/se3quat.h>
#include <g2o/core/eigen_types.h>
#include <g2o/types/slam3d/isometry3d_mappings.h>
#include <g2o/core/robust_kernel.h>
#include <g2o/core/robust_kernel_impl.h>
#include <g2o/core/estimate_propagator.h>
using namespace std;
int main(int argc,char** argv)
{
int N = 0;
if ( argc != 3 )
{
cout<<"Usage: pose_graph_g2o_SE3_lie sphere.g2o"<<endl;
return 1;
}
ifstream fin ( argv[1] );
if ( !fin )
{
cout<<"file "<<argv[1]<<" does not exist."<<endl;
return 1;
}
stringstream ss;
ss<< argv[2];
ss>> N;
cout<<"result file will be saved in result"<<N<<".g2o"<<endl;
typedef g2o::BlockSolver<g2o::BlockSolverTraits<-1,-1>> Block; //6x6 BlockSolver
// 线性方程求解器
//Block::LinearSolverType* linearSolver=new g2o::LinearSolverCholmod<Block::PoseMatrixType>();
//unique_ptr<Block::LinearSolverType> linearSolver(new g2o::LinearSolverCholmod<Block::PoseMatrixType>());
auto linearSolver = g2o::make_unique<g2o::LinearSolverCholmod<Block::PoseMatrixType>>();
linearSolver->setBlockOrdering(true);
// 矩阵块求解器
//unique_ptr<Block> solver_ptr(new Block(std::move(linearSolver)));
cout<<"blockOrdering = "<<linearSolver->blockOrdering()<<endl;
// 梯度下降方法 GN LM DogLeg
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(g2o::make_unique<Block>(std::move(linearSolver)));
solver->printProperties(cout);
// 图模型
g2o::SparseOptimizer optimizer;
optimizer.setVerbose(true);
optimizer.setAlgorithm(solver);
vector<g2o::VertexSE3*> vectices;
vector<g2o::EdgeSE3*> edges;
//vector<g2o::EdgeSE3*> odometryEdges;
int vertexCnt = 0, edgeCnt = 0; // 顶点和边的数量
//加载文件
while ( !fin.eof() )
{
string name;
fin>>name;
if ( name == "VERTEX_SE3:QUAT" )
{
// 顶点
g2o::VertexSE3* v = new g2o::VertexSE3();
int index = 0;
fin>>index;
v->setId( index );
v->read(fin);
optimizer.addVertex(v);
vertexCnt++;
vectices.push_back(v);
if ( index==0 )
v->setFixed(true);
}
else if ( name=="EDGE_SE3:QUAT" )
{
// SE3-SE3 边
g2o::EdgeSE3* e = new g2o::EdgeSE3();
int idx1, idx2; // 关联的两个顶点
fin>>idx1>>idx2;
e->setId( edgeCnt++ );
e->setVertex( 0, optimizer.vertices()[idx1] );
e->setVertex( 1, optimizer.vertices()[idx2] );
e->read(fin);
optimizer.addEdge(e);
edges.push_back(e);
}
if ( !fin.good() ) break;
}
cout<<"read total "<<vertexCnt<<" vertices, "<<edgeCnt<<" edges."<<endl;
//设置鲁棒核函数
bool onlyLoop = false; //对应 No Sequential
for (g2o::SparseOptimizer::EdgeSet::const_iterator it = optimizer.edges().begin(); it != optimizer.edges().end(); ++it)
{
g2o::OptimizableGraph::Edge* e = static_cast<g2o::OptimizableGraph::Edge*>(*it);
if (onlyLoop)
{
if (e->vertices().size() >= 2 && std::abs(e->vertex(0)->id() - e->vertex(1)->id()) != 1)
{
e->setRobustKernel(new g2o::RobustKernelCauchy());
e->robustKernel()->setDelta(1.0);
}
}
else
{
e->setRobustKernel(new g2o::RobustKernelCauchy());
e->robustKernel()->setDelta(1.0);
}
}
// using initial guess from spanning tree
// optimizer.computeInitialGuess();
// using initial guess from odometry
g2o::EstimatePropagatorCostOdometry costFunction(&optimizer);
optimizer.computeInitialGuess(costFunction);
optimizer.initializeOptimization();
optimizer.optimize(30);
char filename1[80];
bool status;
cout<<"save"<<endl;
sprintf(filename1,"result%d.g2o",N);
status = optimizer.save(filename1);
cout<<"status"<< status<<endl;
}
2.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(G2O_test)
set(CMAKE_BUILD_TYPE Debug)
include_directories("/usr/include/eigen3")
include_directories("/usr/include/suitesparse")
find_package( g2o REQUIRED )
include_directories( ${G2O_INCLUDE_DIRS} )
add_executable(g2o_test g2o_test.cpp)
target_link_libraries(g2o_test cholmod g2o_core g2o_stuff g2o_types_slam3d ${G2O_LIBRARIES})
您的点赞是对我最大的肯定和帮助!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号