ROS的安装和卸载
Robot Operating System (ROS) 是一个得到广泛应用机器人系统的软件框架,它包含了一系列的软件库和工具用于构建机器人应用。从驱动到最先进的算法,以及强大的开发者工具,ROS 包含了开发一个机器人项目所需要的所有东西。且它们都是开源的。
ROS 虽然名为机器人操作系统,但它与我们一般概念中的操作系统,如 Windows,Linux,iOS 和 Android 这些。Windows,Linux,iOS 和 Android 这些操作系统为我们管理计算机的物理硬件资源,如 CPU、内存、磁盘、网络及外设,提供如进程、线程和文件这样的抽象,并提供如读文件、写文件、创建进程、创建线程及启动线程这样的操作。ROS 所工作的层级并没有这么低,它基于一般概念中的操作系统来运行,官方推荐基于 Ubuntu Linux 运行,并在 Ubuntu Linux 操作系统提供的抽象和操作的基础之上,提供了更高层的抽象,如节点、服务、消息、主题等,以及更高层的操作,如主题的发布、主题的订阅、服务的查询与连接等操作。同时 ROS 还提供开发机器人项目所需的工具和功能库。
ROS 发行版是一个版本标识的 ROS 包集合,这些与 Linux 发行版(如 Ubuntu)类似。ROS 发行版的目的是让开发者可以基于一个相对稳定的代码库来工作,直到他们可以平稳地向前演进。一旦发行版发布,官方就会限制对其的改动,而仅仅提供对于核心包的 bug fixes 和非破坏性的增强。
当前(2018-01-28) ROS 系统已经发布了多个版本。ROS 最新的一些版本如下:

ROS 基本上保持每年一个新版本,每两年一个长期发行版的发布节奏。关于 ROS 版本发布的更多内容,如更多的发行版的介绍,发布的计划等,可以参考 ROS 官方站点的 Distributions 主页。
目前官方推荐使用最近的一个长期支持版本,即 ROS Kinetic Kame,求新的同时兼顾稳定性无疑应该采用这一版本,如果想要尝试最新的功能特性则可以使用最新的发行版 ROS Lunar Loggerhead。
ROS 的安装步骤如下。
ROS kinetic官网:http://wiki.ros.org/kinetic/Installation/Ubuntu
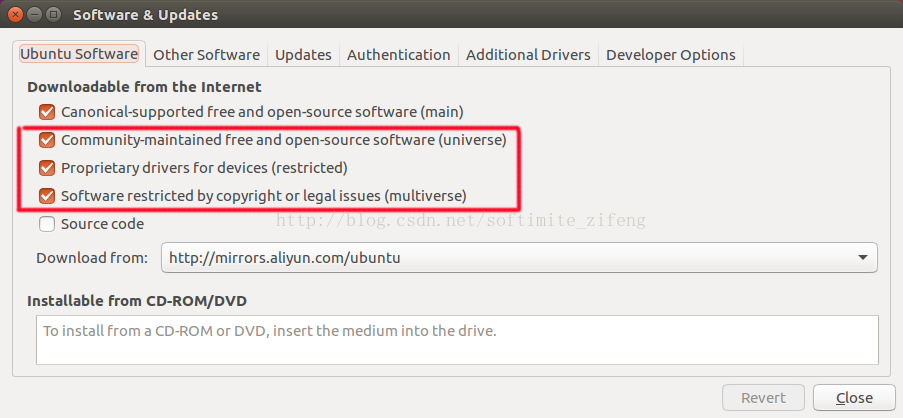
1. 配置Ubuntu的资源库:"restricted","universe"和"multiverse"。一般情况是不用配置的,参考下图红色框部分。
如果没有配置,可以参考Ubuntu官网![]()
2. 安装:
参见:https://blog.csdn.net/weixin_39036700/article/details/81629810
1.设置安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.设置key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
独立的包安装:可以安装一个特定的 ROS 包(用实际的包名来替换下面的命令中的 “PACKAGE”)。
sudo apt-get install ros-kinetic-PACKAGE
如:sudo apt-get install ros-kinetic-slam-gmapping
要找到可用的包,可以使用:apt-cache search ros-kinetic
4.初始化
sudo rosdep init (安装一次后只能运行一次,若重新安装选择跳过或卸载)
rosdep update
结果:
Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
Add distro "lunar"
Add distro "melodic"
updated cache in /home/ubuntu1604/.ros/rosdep/sources.cache
若出现time out 或错误,重试几遍
5.配置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
打开另一个终端:
source ~/.bashrc
如果安装了多个 ROS 发行版,则 ~/.bashrc 必须只 source 当前正在使用的那一版的 setup.bash。
如果你只想要修改当前 shell 的环境,则输入如下的命令来替换上面的命令:source /opt/ros/kinetic/setup.bash
6.安装rosinstallsudo apt-get install python-rosinstall
构建包所需的依赖
到这一步,应该已经安装好了运行核心 ROS 包的所有东西。要创建和管理你自己的 ROS workspace,还有单独发布的许多的工具。比如,rosinstall 是一个常用的命令行工具,使你可以通过一个命令为 ROS 包简单地下载许多源码树。
要安装这个工具及其它的依赖以构建 ROS 包,则运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
完成完整的 ROS 安装之后,可以对安装做一个简单的测试。可以通过 roscore 和 turtlesim 来做测试。
3. 卸载:
sudo apt-get purge ros-*
sudo rm -rf /etc/ros
gedit ~/.bashrc![]()
找到:带有kinetic的那一行删除,保存,然后:
source ~/.bashrc![]()
4. 测试ROS安装成功
1) 打开Termial,输入以下命令,初始化ROS环境:
roscore
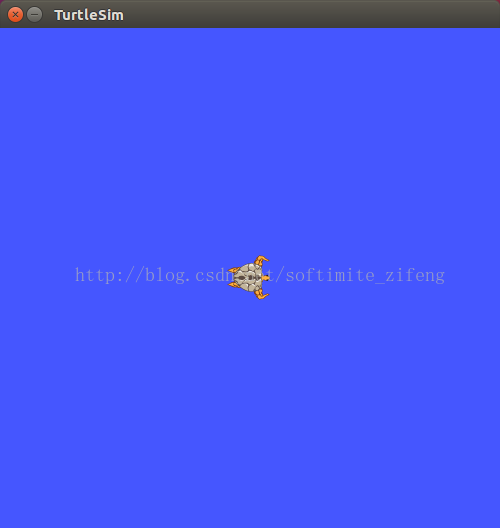
2) 打开新的Termial,输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
![]()
3) 打开新的Termial,输入以下命令,可以在Termial中通过方向键控制小乌龟的移动:
rosrun turtlesim turtle_teleop_key
![]()
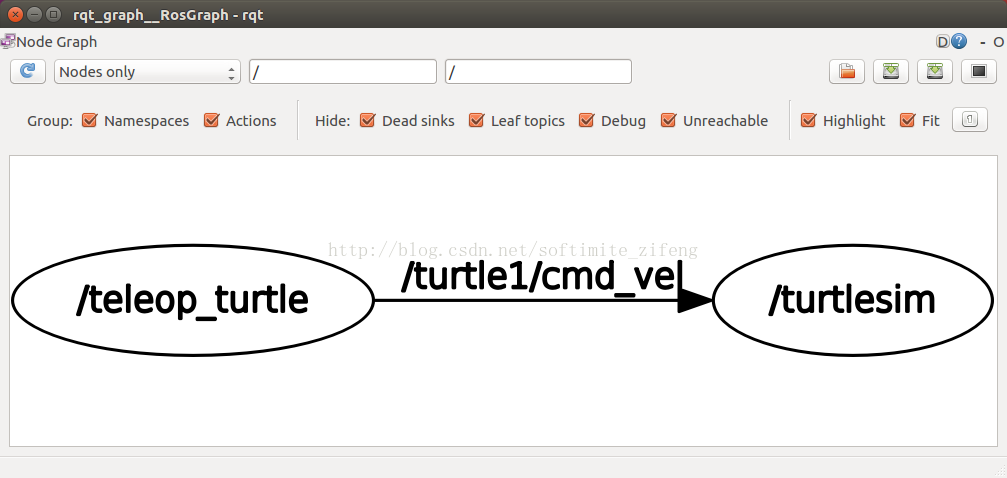
4) 打开新的Termial,输入以下命令,弹出新的窗口查看ROS节点信息:

rosrun rqt_graph rqt_graph
![]()