目录
- JMLR 2019
- https://www.jmlr.org/papers/volume20/18-196/18-196.pdf
- utilizes simulation to learn structured feature transforms that map the original parameter space into a domain-informed space
- During BO, similarity between controllers is now calculated in this transformed space
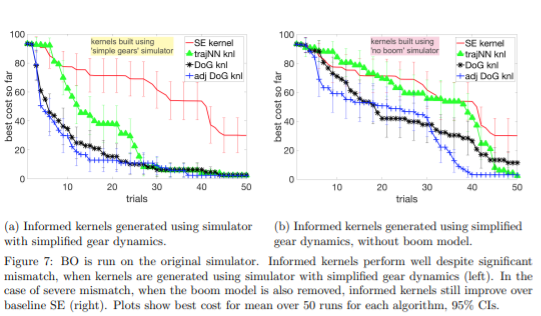
- create increasingly approximate simulators and study the effect of increasing simulation-hardware mismatch
- additional dim for the gap (trained online)
1 Introduction
- robots: costly in real
- black-box, non-convex, discontinuous
- PI^2, PILCO, continuous
- CMA-ES, expensive
- BO, efficiency degrades in high dimensions
2 Background and Related Work
- GP, 0, no prior
- k, large? strongly influence!
- Squared Exponential, hyperparam
- Matern? we use domain-informed! remove the limitation of stationary
- \(u=\pi_x(s)\), trajectory
- incorporating simulation
3 Proposed Approach: Bayesian Optimization with Informed Kernels
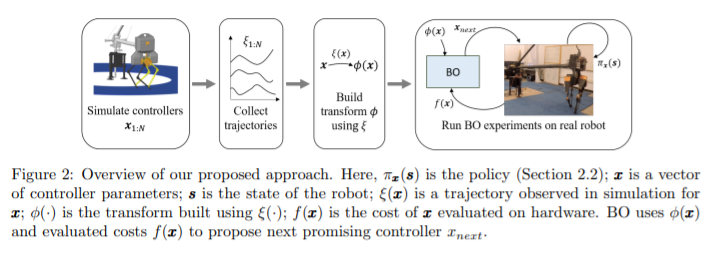
- collect sim traj, build an informed transform ("map")
![image]()
- \(\phi\), form is the same as that of SE kernel
- brings controllers that perform similar in simulation closer together, as compared to the original parameter space. For locomotion, this could bring failing controllers close together to occupy only a small portion of the transformed space
- In essence, this means that the resultant kernel, though stationary in \(\phi\), is non-stationary in x
- learn a feature transform
- traj summary, fall: far away from walk
- Sobol grid, dataset for NN to fit
- NN outputs: kernel for BO
- didn't carefully select the sensory traces
3.2
- mismatch (gap)? extra dimension for mismatch
- similarity between: representation in \(\phi\) space and expected mismatch
- rigorous
- in fact, a trainable kernel (online)
4 Robots, Simulators and Controllers Used
- different kinds of controllers
5 Experiments

- DoG: domain knowledge
![image]()
- gap!
- prior-based? biased towards sampling promising points from simulation, bad!
- kernel-based? √
- needn't to be re-run for another cost
- less sample-efficient
- easy to generalize
- possible to combine