


一、RPN网络结构
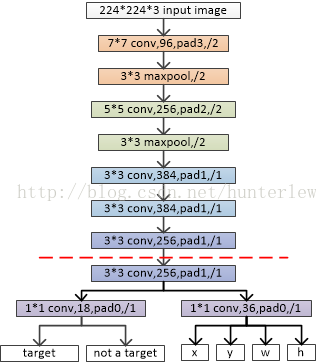
虚线之上,是RPN结构之前的网络结构,可以替换为VGG、ResNet等
假如输入图像是1000*600,则经过了几次stride后,map大小缩小了16倍,最后一层卷积层输出大约为60*40大小,那么相当于用3*3的窗口滑窗(注意有padding),对于左边一支路而言,输出18个通道,每个通道map大小仍为60*40,代表每个滑窗中心对应感受野内存在目标与否的概率。右支路同理。
二、Anchor
Anchor是候选区域的意思。候选区域的生成方式如图。
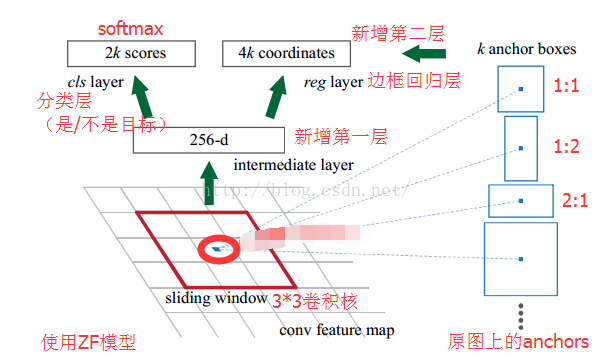
因此,在对60*40的map进行滑窗时,以中心像素为基点构造9种anchor映射到原来的1000*600图像中,映射比例为16倍。那么总共可以得到60*40*9大约2万个anchor。
三、训练
对于左支路,ground truth为anchor是否为目标,用0/1表示。那么怎么判定一个anchor内是否有目标呢?论文中采用了这样的规则:1)假如某anchor与任一目标区域的IoU最大,则该anchor判定为有目标;2)假如某anchor与任一目标区域的IoU>0.7,则判定为有目标;3)假如某anchor与任一目标区域的IoU<0.3,则判定为背景。所谓IoU,就是预测box和真实box的覆盖率,其值等于两个box的交集除以两个box的并集。其它的anchor不参与训练。
由此可知,RPN的训练数据是符合要求的anchors,标签是anchors的前景/背景分类以及坐标
