详解Kalman Filter
中心思想
现有:
- 已知上一刻状态,预测下一刻状态的方法,能得到一个“预测值”。(当然这个估计值是有误差的)
- 某种测量方法,可以测量出系统状态的“测量值”。(当然这个测量值也是有误差的)
我们如何去估计出系统此时真实的状态呢?
答案是需要结合“预测值”和“测量值”。例如我们可以加权求和,但是这个权重要怎么定义,才能准确估计出真实状态呢?这个权重就是Kalman Filter解决的事情。
系统建模
预测方法
我们假设这个预测方法是线性变换,\(B_ku_k\)是除了状态转移之外的控制量。\(w_k\)是预测误差,假设为高斯分布(即均值为0的多元正态分布),其协方差矩阵为\(Q_k\)。
也就是说,下一刻我们的预测值,有一部分与上一刻状态有关,一部分与外力控制有关(外力控制与上一刻状态无关),还有一部分被噪声所影响。
举个例子:
假设一小车在x轴上向前以速度\(v\)匀速运动,\(x_k\)表示的是k时刻小车在x轴上的坐标。显然我们有$$x_k=x_{k-1}+vt$$,这里速度v和时间t都和上一个状态无关,属于让小车位置变化的“外力”。在这个例子里\(F_kx_{k-1}\)部分就是\(x_{k-1}\),而\(B_ku_k\)部分就是\(vt\)。
测量方法
因为我们不一定有测量仪器能直接测量出系统状态,因此我们假设测量方法也是线性变换。
也就是说,当我们的测量仪器用于测量系统状态\(x_k\)时,它的读数是系统状态加上一定的线性变换\(H_k\),以及测量噪声\(v_k\),假设为高斯分布(即均值为0的多元正态分布),其协方差矩阵为\(R_k\)。
举个例子:
我们称体重需要得到以“斤”为单位的数据,这是系统状态,但是我们的称只能读出单位为“kg”的数据(这就是\(z_k\)),那我们就需要做一个单位转换(对应\(H_k\)),此外,由于称不一定准,所以最后称的读数还得加上一点噪声。
所有参数中:\(F_k\)、\(B_k\)、\(u_k\)、\(Q_k\)、\(H_k\)、\(R_k\)都需要已知,要么自己根据公式和经验定义,要么从样本数据里估计一个值。
算法
Kalman Filter将一直维护对系统状态\(x_k\)的最优估计值,以及这个估计值的偏差:
- \(\hat{x}_k\),系统状态,可以是多维的。
- \(P_k\),\(\hat{x}_k\)的误差。当\(\hat{x_k}\)是一维时,\(P_k\)是方差;当\(\hat{x_k}\)是多维时,\(P_k\)是协方差\(cov(\hat{x_k})\),就是\(\hat{x_k}\)里各维两两协方差。
预测阶段
首先,通过系统的预测方法,我们可以得到“预测值”:
由于误差不知道,且假设其均值为0,所以这里不算误差
那么协方差也可以从上一个状态转移:
更新阶段
这个阶段需要结合“预测值”和“测量值”。先把具体的方程摆上来:
- 计算测量值残差(innovation/measurement pre-fit residual):\(\tilde{y}_k=z_k-H_k\bar{x_k}\)(我的理解是\(H_k\)就是为了把测量值和预测值转换到同一个空间)
- 计算测量值残差的协方差(Innovation (or pre-fit residual) covariance):\(S_k=H_k\bar{P}_kH_k^T+R_k\)
- 计算卡尔曼增益(Kalman Gain):\(K_k=\bar{P}_kH_k^TS_k^{-1}\)
- “更新” 最终得到的估计值:\(\hat{x}_k=\hat{x}_{k-1}+K_k\tilde{y}_k\)
- “更新” 最终得到的估计值的协方差:\(P_k=(I-K_kH_k)P_{k-1}\)
总之最后的算法就是,每得到一个“测量值”,就重复一遍预测和更新阶段。
\(\mathbf{K}\)就是Kalman Gain,它衡量了“测量值”和“预测值”之间的权重比例,\(\mathbf{K}\)越大,“测量值”所占权重越大。从公式可以看出:
- \(Q_k\)越大,\(\bar{P}_k\)越大,\(\mathbf{K_k}\)越大。这从物理意义上也是说得通的,当预测值的误差更大的时候,当然应该多信任测量值。
- \(R_k\)越大,\(S_k\)越大,\(\mathbf{K_k}\)越小。也就是说,当“测量值”的误差越大时,该公式将更信任“预测值”。
所有参数中,\(F_k\)、\(B_k\)、\(u_k\)、\(H_k\)基本都需要根据你的问题的建模来决定,而除此之外的\(Q_k\)和\(R_k\)就是两个用于控制预测灵活性的参数,有点类似于指数滑动平均算法的那个\(\alpha\)。
更新阶段原理(试图)详解
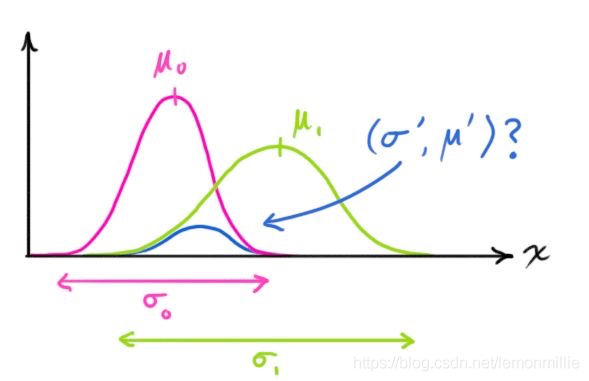
结合“预测值”和“测量值”的思想


(结合高斯分布解释)具体公式怎么推导
让我们从一维看起,设方差为\(\sigma^2\),均值为\(\mu\),一个标准一维高斯钟形曲线方程如下所示:
那么两条高斯曲线相乘呢?
把这个式子按照一维方程进行扩展,可得:
如果有些太复杂,我们用k简化一下:
以上是一维的内容,如果是多维空间,把这个式子转成矩阵格式:
其中,\(\Sigma\)表示协方差。
代入到Kalman Filter里,我们把“预测分布”\((\mu_0, \Sigma_0)=(H_k\bar{x}_k,H_k\bar{P}_kH_k^T)\),和“测量分布”\((\mu_1, \Sigma_1)=(z_k,R_k)\)代入到上面的等式里,那么新分布\((\mu',\Sigma')=(H_k\hat{x}_k, H_kP_kH_k^T)\)为:
这里\((\mu_0, \Sigma_0)=(H_k\bar{x}_k,H_k\bar{P}_kH_k^T)\)乘以了系数\(H_k\)是为了把\(x_k\)转换到和\(z_k\)一个坐标系。
等式两边消掉\(H_k\)并化简后:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号