
增强学习笔记 第九章 On-Policy预测的近似
对于状态空间太大的问题,表格类方法无法存储这么大的价值表,也没有办法穷尽这么多的状态。考虑到很多状态是相似的,知道一个状态的价值也就大概知道类似状态的价值,因此可以采用函数近似的方法,函数近似是监督学习的一个应用。
这一章我们主要做价值函数的近似。我们定义一个N维参数$\boldsymbol \theta$, N比状态数量小很多,$\theta$可以是线性规划的权重,也可以是神经网络的权重,还可以是决策树的分叉点。得到$v_{\pi}(s)\approx \hat v(s,\boldsymbol \theta)$
9.1 价值函数近似
我们将每一次backup操作当成一个监督学习中的样例。但并不是所有监督学习方法都适用于增强学习,增强学习需要支持在线学习,并且需要支持非平稳的目标函数。
9.2 预测目标
对表格类方法来说,不同状态的价值函数是可以独立学习的,但是对近似方法来说,可能产生连带效应。改善一个状态的价值预测有可能损害其他状态的价值预测。因此需要知道哪个状态我们最重视。定义
![]()
其中$d(s)$表示该策略下状态经历的时间比重。定义$h(s)$为$s$作为初状态比例(已知),$\eta(s)$为episode中经历的次数(未知)。解下列方程组

可以得出$\eta(s)$,从而算出$d(s)$
采用MSVE的理由并不是十分明确,毕竟我们的最终目标是改善policy,而不是最小化平方误差,但是实践中我们没有找到明确更好的指标。
我们的目标是找到一个最优的$\theta^*$使得MSVE最小。
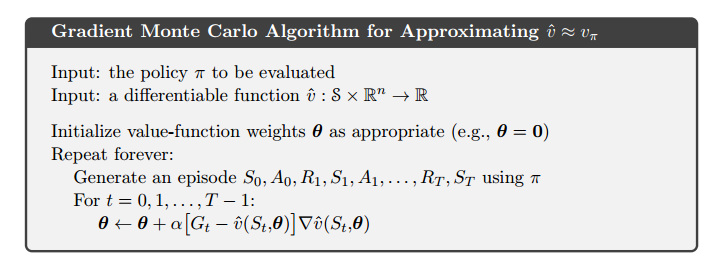
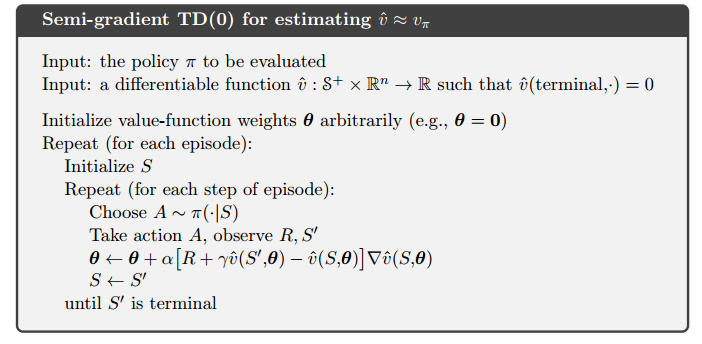
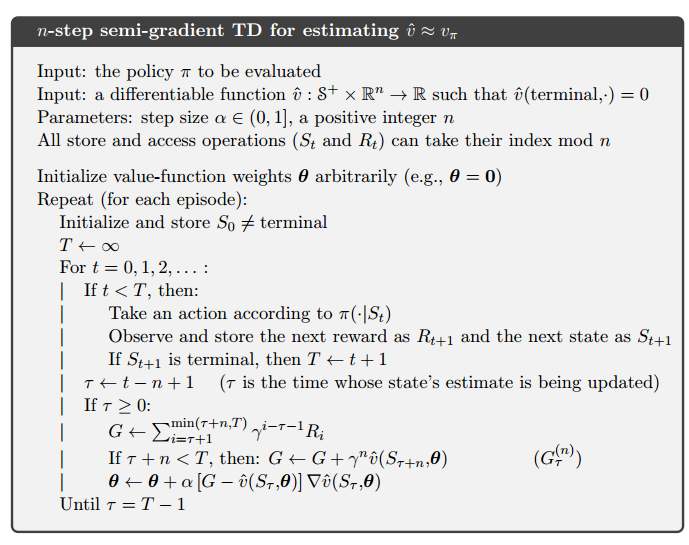
9.3 随机梯度下降和半梯度方法

这个式子并不是严格的梯度下降,如果采用bootstrap的话,$U_t$本身也和$\theta$相关。这时候只能称为半梯度算法,实践中该方法有较好的收敛性,至少在线性方法中,是保证收敛的。
9.4 线性方法
取梯度有:
得出迭代式:
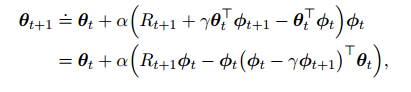
对两边取期望:

其中

当收敛时,有$\theta_{t+1}=\theta_t$,可以得出:

9.5 线性方法的特征构造
因为线性方法具有高效、收敛等优良特性,我们需要它设计一系列特征构造方法。
特征的选择需要应用先验知识,保证和任务相关。同时我们也需要组合特征,因为线性方法并不能处理特征之间的组合性。例如在倒立车问题中,杆子很低是很危险的,但是这时候如果有很大的向上的角速度,则我们认为是安全的。
9.5.1 多项式基
对d状态变量来说,每个状态是一个d维实数向量,因此基函数可以表示为:
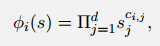
其中$c_{i,j}$是0到N之间的整数
i为基函数索引,j是状态分量索引。
因此共有$(N+1)^d$个基函数。
9.5.2 傅里叶基
傅里叶基可以以任意精度来逼近任何函数,对[0,T/2]区间的逼近来说,可以只保留cos部分。
我们假定T=2,实现[0,1]区间函数的逼近,N阶基函数为:
$\phi_i(s)=\cos(i\pi s)$
对d维(0,1)立方体来说,状态s表示为$(s_1,s_2,\cdots,s_d)^T$,基函数为:
$\phi_i(s)=\cos(\pi\boldsymbol c^i\cdot \boldsymbol s)$
共有$(N+1)^d$个基函数,其中$c_j_i$表示第i个基函数第j个状态分量的系数
傅里叶基的拟合能力比多项式基通常要好

9.5.3 Coarse Coding
在状态空间中画一系列的圈,如果状态在圈中,则对应的feature为1。这样就构造出了一系列二值feature。
圈圈的大小在初期会影响函数拟合,大圈圈通常会泛化的更宽。
如果圈圈数量足够多,并不会影响拟合的精细度。在后期就可以体现出来。
9.5.4 Tile Coding
对状态空间的网格划分称为tiling,网格中的小正方形称为tile。
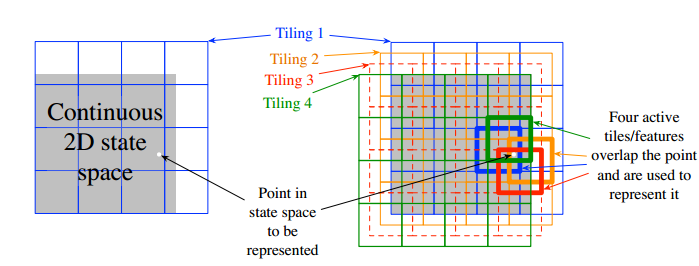
对d维状态来说,第一个tiling通常采用(1,3,5,...,2d-1)作为tiling之间的间隔。而tiling的个数则为大于等于4d的2的幂方。
9.5.5 径向基
径向基是对Coarse Coding在连续值上的推广。它的feature值可以是[0,1]上的实数。

径向基有平滑性和可导性,但是实际上并没有显示太好的性能,它的计算负担也比tile coding更重。在高维度空间中,tile的边界变得比较重要,而径向基函数的表现不尽如人意。
9.6 神经网络
在RL中,神经网络可以使用TD误差来学习价值函数。通常1-2层的隐藏层具有较好的效果。
9.7 LSTD (略)


