
摘要:
tf2是一个转换库,它允许用户跟踪一段时间内的多个坐标系。
tf2在时间上缓冲的树结构中维持坐标帧之间的关系,并允许用户在任何期望的时间点变换任意两个坐标帧间的点、向量等。 阅读全文
摘要:
URDF(统一机器人描述格式)是一种文件格式,用于指定ROS中机器人的几何结构和组织。 阅读全文
摘要: 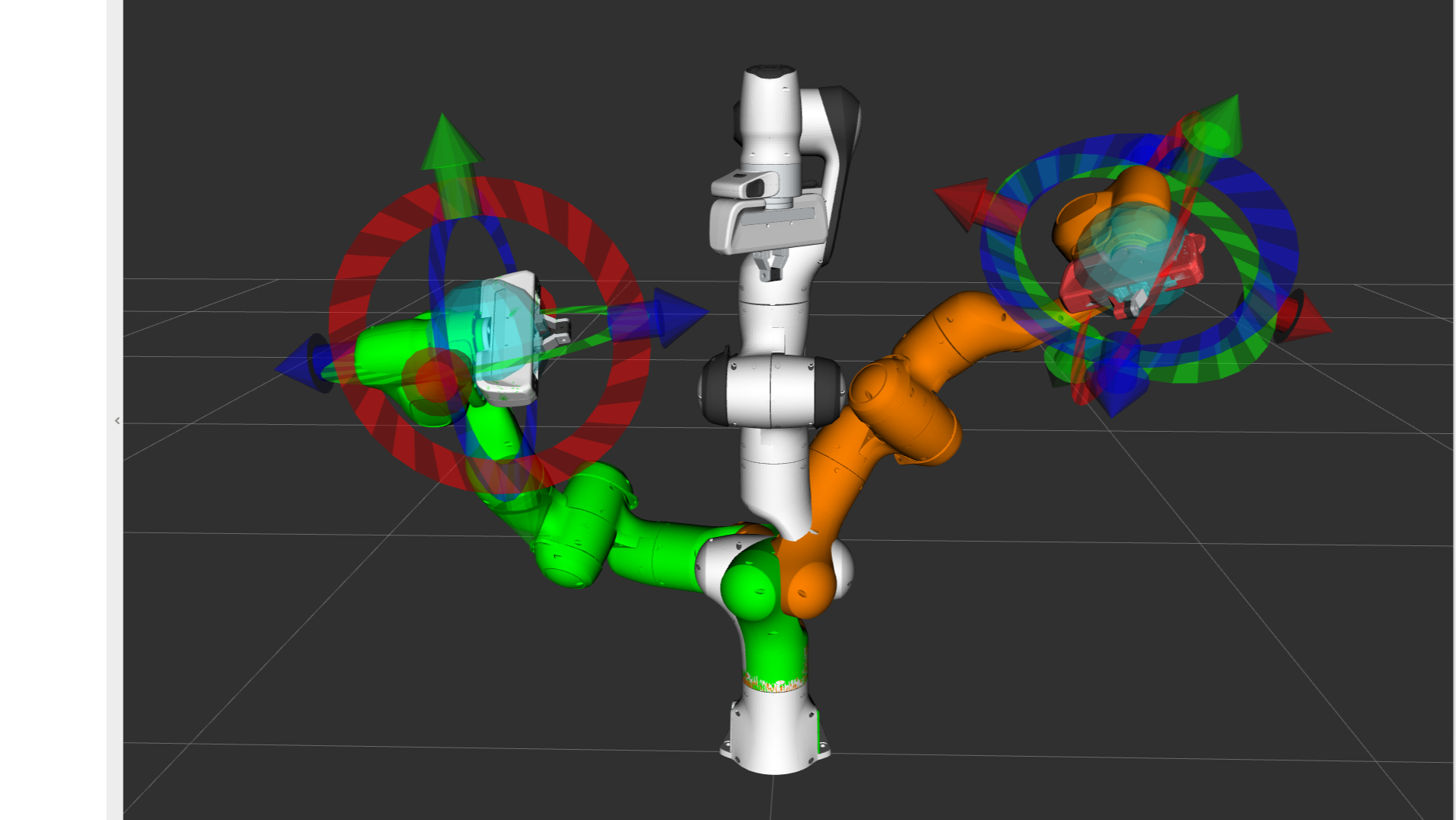 通过初学者教程学习MoveIt的基础,帮助您创建下一个机器人操纵项目。 阅读全文
通过初学者教程学习MoveIt的基础,帮助您创建下一个机器人操纵项目。 阅读全文
通过初学者教程学习MoveIt的基础,帮助您创建下一个机器人操纵项目。 阅读全文
摘要:
ROS2启动文件允许您同时启动和配置包含ROS 2节点的多个可执行文件。 阅读全文
摘要:
使用rosdep管理依赖关系,创建操作,编写动作服务器和客户端(C++),在单个进程中组合多个节点,监控参数更改(C++),发动,tf2,测试,URDF 阅读全文
摘要:
确保软件包列表和已安装的软件包是最新的。 sudo apt update sudo apt upgrade 安装和配置php sudo apt show php sudo apt install php-fpm sudo apt install php-dom sudo apt install ph 阅读全文
摘要:
使用colcon构建包 背景 colcon是ROS构建工具catkin_make、catkin_make_isolated、catkin_tools和ament_tools的迭代。 有关colcon设计的更多信息,请参阅本文档。 源代码可以在colcon GitHub组织中找到。 先决条件 安装co 阅读全文
摘要:
配置环境 使用turtlesim和rqt Turtlesim是一款用于学习ROS 2的轻量级模拟器。 它演示了ROS 2在最基本的级别上的功能,让您了解稍后将如何使用真实的机器人或机器人模拟。 rqt是ROS2的GUI工具。 rqt中的所有操作都可以在命令行上完成,但它提供了一种更简单、更用户友好的 阅读全文
摘要:
ros2_control是使用(ros2)对机器人进行(实时)控制的框架。 它的包是ros(机器人操作系统)中使用的ros_control包的重写。 ros2_control的目标是简化新硬件的集成并克服一些缺点。 如果您不熟悉控制理论,请对其有所了解(例如,在维基百科上),以熟悉本手册中使用的术语 阅读全文
摘要:
开发环境 OS : Ubuntu 20.04.05 LTS (Focal Fossa 专注的狸貓) CE : Visual Studio Code 1.71 PL : C++ 11 && Python 3.8 当前可用于Ubuntu(Focal Fossa)系统的Debian包是Ros2 Galac 阅读全文