
作业管理——作业调度算法
作业调度算法一般有三种状态:正在运行(Running,正在CPU中执行)待命(Ready,等待执行)阻塞(Blocked,任务暂停,等待一个事件的发生,例如接收一组数据)。
先来先服务法:最简单的调度算法,按作业的先后顺序进行调度,只考虑每个作业的等待时间而未考虑执行时间的长短。
时间片轮转法:根据先来先服务的原则,将需要执行的所有进程按照到达时间的大小排成一个升序的序列,每次都给一个进程同样大小的时间片,在这个时间片内如果进程执行结束了,那么把进程从进程队列中删去,如果进程没有结束,那么把该进程停止然后改为等待状态,放到进程队列的尾部,直到所有的进程都已执行完毕。
短作业优先法:最短作业优先算法是对先来先服务算法的改进,其目标是减少平均周转时间。对预计执行时间短的作业优先分派处理机。通常后来的短作业不抢先正在执行的作业。 只考虑执行时间而未考虑等待时间的长短。
最高优先权优先法:
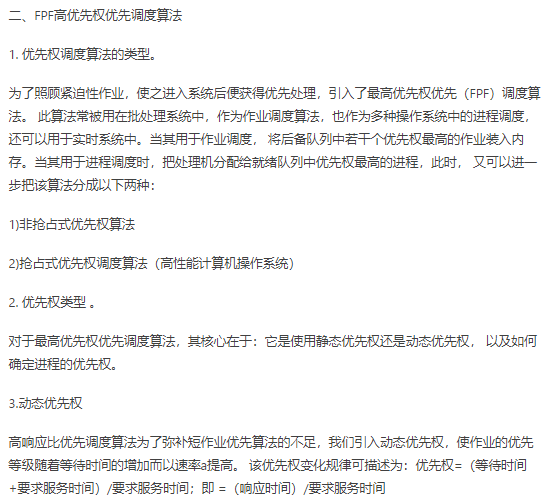
高响应比优先法:最高响应比优先算法是对先来先服务方式和最短作业优先算法方式的一种综合平衡。最高响应比优先法调度策略同时考虑每个作业的等待时间的长短和估计需要的执行时间长短,从中选出相应比最高的作业投入执行。
可参考链接:
https://blog.csdn.net/JobinXin/article/details/109842108

 浙公网安备 33010602011771号
浙公网安备 33010602011771号