


边缘检测算子(Roberts算子、Prewitt算子、Sobel算子 和 Laplacian算子 canny检测) 转发
转自
https://blog.csdn.net/zaishuiyifangxym/article/details/89840396
https://xiongyiming.blog.csdn.net/article/details/90142702
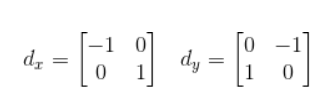
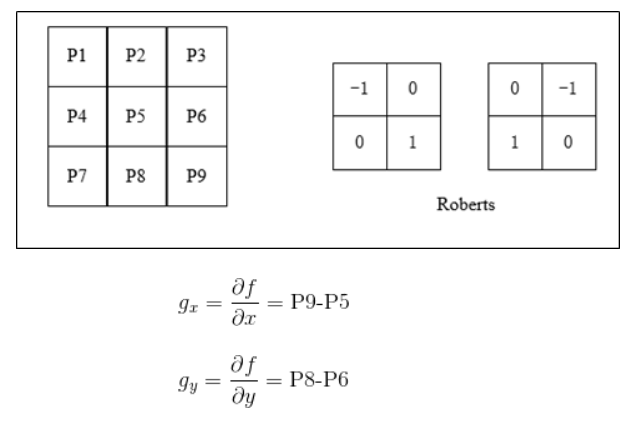
1.Roberts算子
基于交叉差分的梯度算法,通过局部差分计算检测边缘线条。
常用来处理具有陡峭的低噪声图像,当图像边缘接近于正45度或负45度时,该算法处理效果更理想。
其缺点是对边缘的定位不太准确,提取的边缘线条较粗。
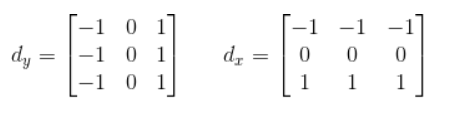
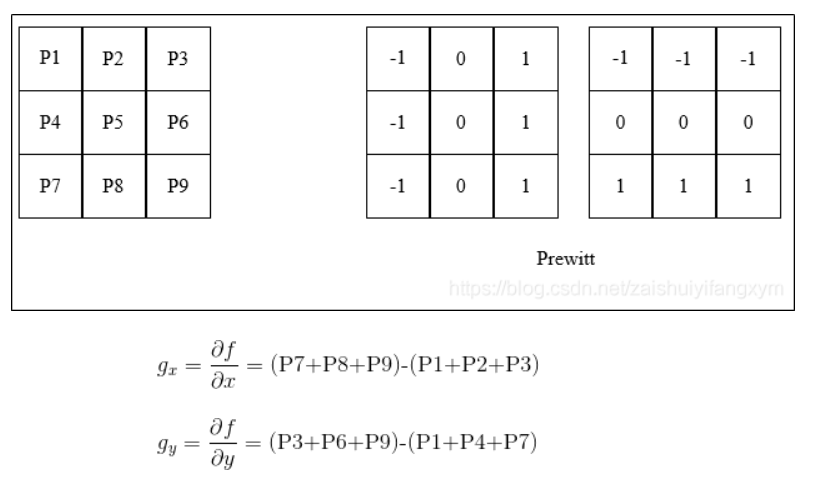
2.Prewitt算子
利用特定区域内像素灰度值产生的差分实现边缘检测。由于Prewitt算子采用 33 模板对区域内的像素值进行计算。
Prewitt算子的边缘检测结果在水平方向和垂直方向均比Robert算子更加明显。
Prewitt算子适合用来识别噪声较多、灰度渐变的图像。
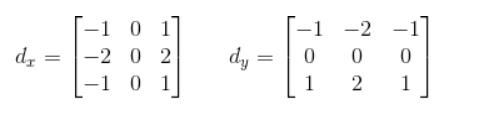
3.Sobel算子
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息。
因为Sobel算子结合了高斯平滑和微分求导(分化),因此结果会具有更多的抗噪性,当对精度要求不是很高时,Sobel算子是一种较为常用的边缘检测方法。
Sobel算子的边缘定位更准确,常用于噪声较多、灰度渐变的图像。
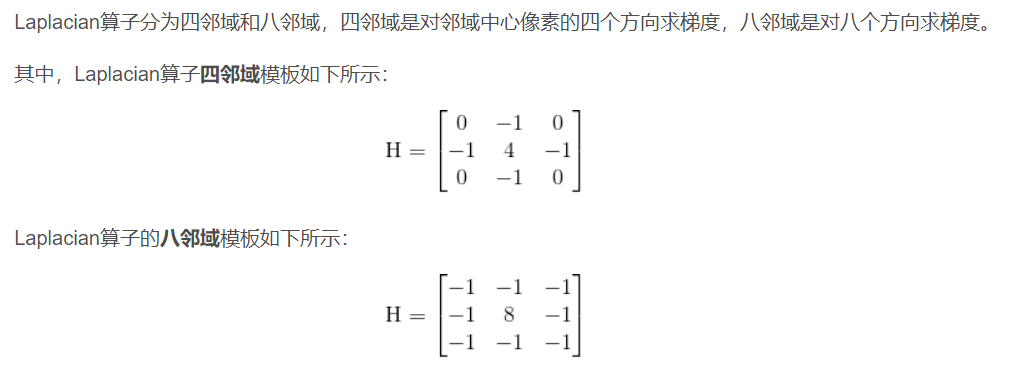
4.拉普拉斯算子
实质是二阶微分。
5.canny检测
Canny算法是一种被广泛应用于边缘检测的标准算法,其目标是找到一个最优的边缘检测解或找寻一幅图像中灰度强度变化最强的位置。最优边缘检测主要通过低错误率、高定位性和最小响应三个标准进行评价。Canny算子的简要步骤如下:
(1)去噪声:应用高斯滤波来平滑图像,目的是去除噪声
(2)梯度:找寻图像的梯度
(3)非极大值抑制:应用非最大抑制技术来过滤掉非边缘像素,将模糊的边界变得清晰。该过程保留了每个像素点上梯度强度的极大值,过滤掉其他的值。
(4)应用双阈值的方法来决定可能的(潜在的)边界;
(5)利用滞后技术来跟踪边界。若某一像素位置和强边界相连的弱边界认为是边界,其他的弱边界则被删除。

posted on 2021-01-24 20:28 merlinzjl 阅读(4472) 评论(0) 编辑 收藏 举报

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具
2018-01-24 MFC 多窗口通信时,使用RadioButton和Button时冲突问题
2018-01-24 MFC中处理UI界面时的注意点