模糊检测(转载)
转载https://blog.csdn.net/baidu_31657889/article/details/84671927
模糊检测
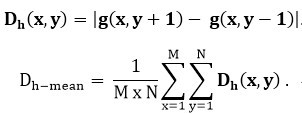
模糊估计分为两个步骤:首先是边缘检测,然后是模糊确定。此处模糊估计是通过计算当前像素点与领域内像素点均值之差来确定。我们用f(x,y) 表示图片,其中

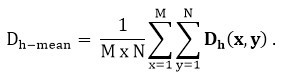
整个图片的水平绝对差的均值为:
如果当前像素点的 




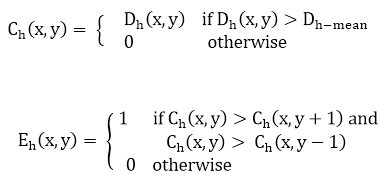
接下来我们检测边缘点是否模糊。定义:
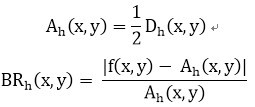
同理,按照以上的步骤我们可以计算垂直方向的值 


低于阈值ThB的Inverse Blurriness 被认为是模糊的。实验测试表明此处的阈值ThB取值0.1。最后,边缘模糊的均值和比率为:


**B)噪点检测
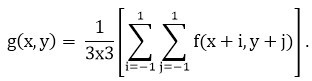
**因为沿边缘的噪点视觉上不明显,因此我们只检测边缘之外的噪点。边缘检测会被噪点影响,因此在检测边缘之前做一个噪点滤波的预处理。在本文中,我们应用均值滤波来消除噪点。均值滤波之后的图像g(x,y)为:
候选的噪点估计如下:
同理可以在垂直方向计算对应的值。然后得到候选的噪点是:

其中N_cand(x,y)表示候选噪点,它在边缘区域为0。
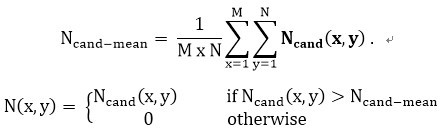
噪点均值和比率为:

其中Sum_Noise是N(x,y)之和,Noise_cnt是噪点总数目。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号