关于Android 传感器坐标与读数的进一步讨论
关于Android 传感器坐标与读数的进一步讨论
之前一些相关的讨论见:
Android Sensors (5) 运动传感器 Motion Sensors
Android Sensors (6) 位置传感器 Position Sensors
传感器分类
总体来说,传感器分为运动传感器和位置传感器两种。(此处忽略了一些温度、光照等环境传感器)。
运动传感器用来监测设备的运动,比如倾斜、震动和摇摆。运动传感器包括:加速度计、陀螺仪、重力感应器、线性加速度计、旋转向量传感器。
位置传感器用来监测设备的位置,即相对于世界坐标系的位置。包括地磁场传感器、接近传感器和方向传感器。
(方向传感器是基于软件的,根据加速度计和地磁场传感器导出)。
可以看出,手机的上述传感器读数,需要涉及到两个坐标系,一个是相对于手机自身,一个是相对于世界位置。
上面很多传感器是测量手机自身姿态的,那么它们读出的数是相对于手机坐标系的;
另一些传感器和方法,目的是测量手机在世界坐标系中的位置,那么它们的读数就是相对于世界坐标系的。
手机的自然坐标系
当一个设备被放在其默认的方向上时,X轴是水平指向右的,Y轴是垂直向上的,Z轴是指向屏幕正面之外的,即屏幕背面是Z的负值。
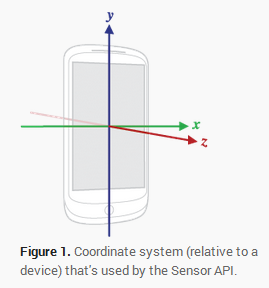
当设备运动或者旋转的时候,这些坐标轴是不会改变的,即它们是跟随手机的。
即是说,手机坐标系是跟随设备的自然方向的(但是请记住自然方向不一定是竖直,比如平板它的自然方向就很有可能是横向)。
使用这个坐标系的传感器:
即是说它们的度数显示了在手机的这三个轴上的数字大小。
屏幕旋转
常常要考虑屏幕的旋转,即屏幕画面相对于自然方向的旋转。
于是就需要使用 getRotation()方法来获取屏幕的旋转值。
这个方法是Display类中的,跟传感器不相关。
这个方法的返回值只对应0,90,180,270四种旋转情况,它说明屏幕显示区域的旋转情况。
世界坐标系
有一些传感器和方法使用相对于世界的坐标系,因为它们返回的数据反映设备相对于地球及真实环境的位置信息。
请见getOrientation() 方法,getRotationMatrix() 方法,Orientation Sensor, 和 Rotation Vector Sensor。下面各自介绍。
getRotationMatrix()
getRotationMatrix()方法说明中,定义的世界坐标系如下:

X轴平行于地面,指向东方。
Y轴平行于地面,指向北极方向。
Z轴垂直于地面,指向天空。
getOrientation()
getOrientation() 方法中所用的坐标系与上面的不同:

X轴平行于地面,指向西方;
Y轴平行于地面,指向地磁场北极。
Z轴垂直于地面,指向地心。
getOrientation方法的返回值表示:
values[0]: azimuth, rotation around the Z axis.
values[1]: pitch, rotation around the X axis.
values[2]: roll, rotation around the Y axis.
并且这三个角度值都是以弧度做单位,逆时针方向为正。
方向传感器的返回值说明
方向传感器是利用加速度计和地磁场传感器得到自己的数据。
方向传感器比较特殊,因为它的数值是相对于绝对方向的。它得到的是手机设备的绝对姿态值。
一个方向传感器得到的三维数据如下:
(参见http://developer.android.com/guide/topics/sensors/sensors_position.html#sensors-pos-orient)
方向传感器返回的都是角度值,以度数为单位。
注意下面说的x、y、z轴均是手机自身的坐标轴。
第一个角度:Azimuth (degrees of rotation around the z axis).
表示手机自身的y轴与地磁场北极方向的角度,即手机顶部朝向与正北方向的角度。
(This is the angle between magnetic north and the device's y axis. )
当手机绕着自身的z轴旋转时,该角度值将发生改变。
例如该角度值为0时,表示手机顶部指向正北;该角度为90度时,代表手机顶部指向正东;该角度为180度时,代表手机顶部指向正南;该角度为270度时,代表手机顶部指向正西。
第二个角度:Pitch (degrees of rotation around the x axis).
表示手机顶部或尾部翘起的角度。
当手机绕着自身的x轴旋转,该角度会发生变化,值的范围是-180到180度。
当z轴正向朝着y轴正向旋转时,该角度是正值;当z轴正向朝着y轴负向旋转时,该角度是负值。
假设将手机屏幕朝上水平放在桌子上,如果桌子是完全水平的,该角度应该是0。
假如从手机顶部抬起,直到将手机沿x轴旋转180度(屏幕向下水平放在桌面上),这个过程中,该角度值会从0变化到-180。
如果从手机底部开始抬起,直到将手机沿x轴旋转180度(屏幕向下水平放在桌面上),该角度的值会从0变化到180。
第三个角度:Roll (degrees of rotation around the y axis).
表示手机左侧或右侧翘起的角度。
当手机绕着自身x轴旋转时,该角度值将会发生变化,取值范围是-90到90度。
当z轴正向朝着x轴正向旋转时,该角度是负值;
当z轴正向朝着x轴负向旋转时,该角度是正值。
(这里跟官方文档的说法有点不太一致,即第三个角度的正负号正好相反,我不知道是文档写错了,还是它用了别的什么坐标系)。
因为通过真机测试,结果如下:
将手机屏幕朝上水平放在桌子上,如果桌子是完全水平的,该角度应该是0。
假如将手机左侧逐渐抬起,直到将手机沿Y轴旋转90度(手机与桌面垂直),在这个旋转过程中,该角度会从0变化到-90。
如果从手机的右侧开始抬起,直到将手机沿Y轴旋转90度(手机与桌面垂直),该角度的值会从0变化到90度。
其他说明:
由于需要计算,所以方向传感器的准确度和精度都会受到影响。
官方文档上说,只有当第三个roll的角度值为0的时候得到的值比较可靠。
specifically, this sensor is only reliable when the roll component is 0。
所以从Android 2.2 (API level 8)开始,不建议使用方向传感器。
建议使用 getRotationMatrix()和getOrientation() 结合来计算方向值。
也可以利用 remapCoordinateSystem()方法来进行一些方向值向其他坐标系的转换。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号