arduino无驱动运行8毫米的超迷你微型两相四线步进电机
原文视频:
https://www.youtube.com/watch?v=xEjfAWV3WWU


在淘宝淘了一些超迷你的步进电机,但是店家并不提供详细资料,经过一番搜索,终于获得信息如下:
名称:8mm微型步进电机 小型2相4线步进马达
英文名称:Abovehill 8mm Micro Stepper Motor 2-Phase 4-Wire DC 5-6V with Connection line +gear
【相电阻】40欧姆
【步距角】18°
【重量】5.8克
1. 这是一款精密8毫米微型步进电机,广泛应用于数码相机等数码产品中
2. 适用于5-6V 电压,驱动电流为0.12 a,短路电流为0.14 a
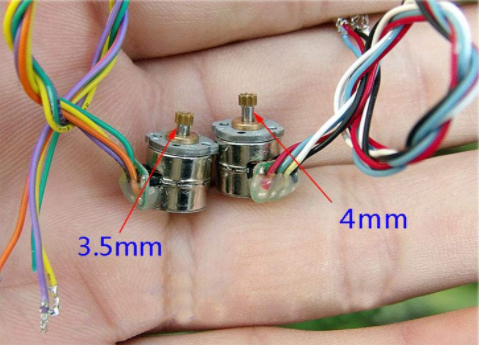
3. 每对电机由两台电机捆绑,输出轴长度分别为4毫米和3.5毫米,都装有齿轮
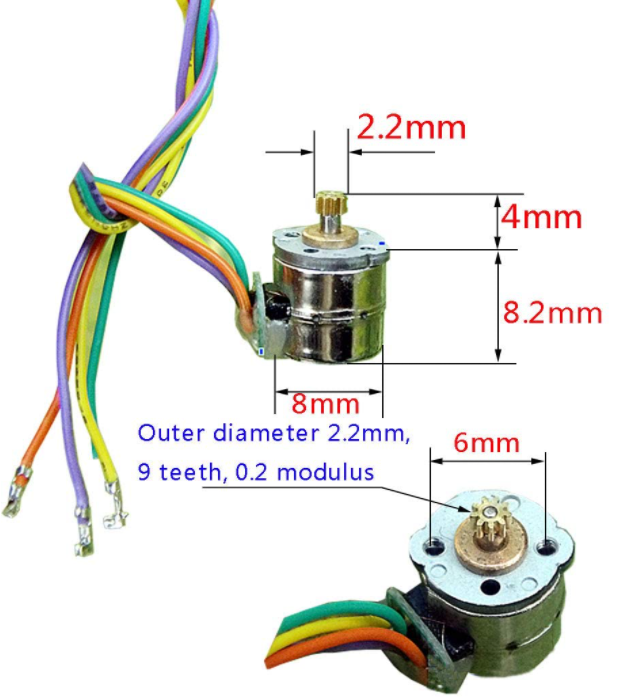
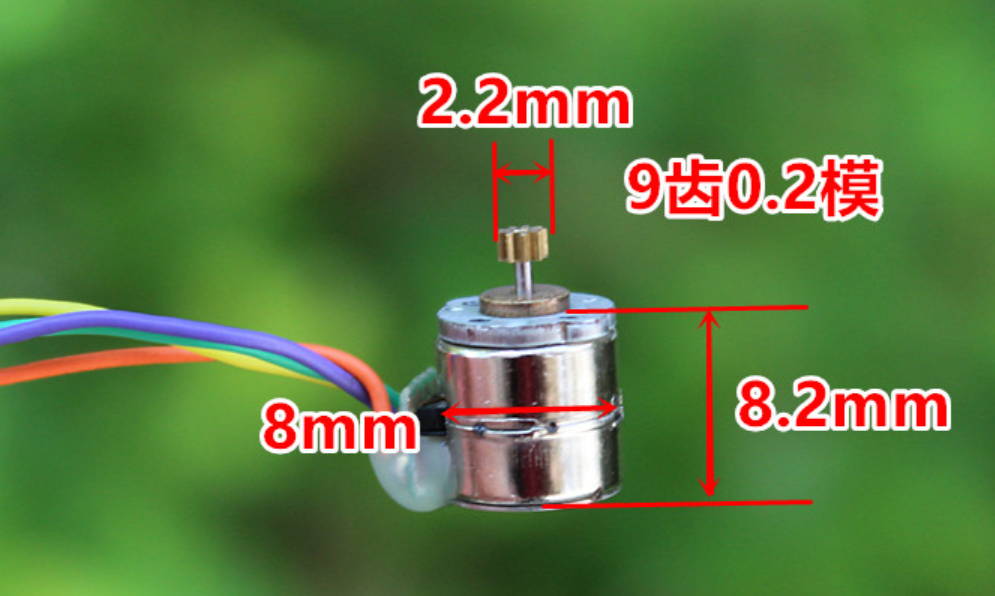
4. 电机直径: 8毫米,电机高度: 8.2毫米,输出轴直径: 1.5毫米,齿轮外径: 2.2毫米
5.长轴电机连接线定义: (蓝色: a + ,黑色: a-。红色: b + ,白色: b -)短轴电机连接线定义: (紫色: a + ,黄色: a-。橙色: b + ,绿色: b -)

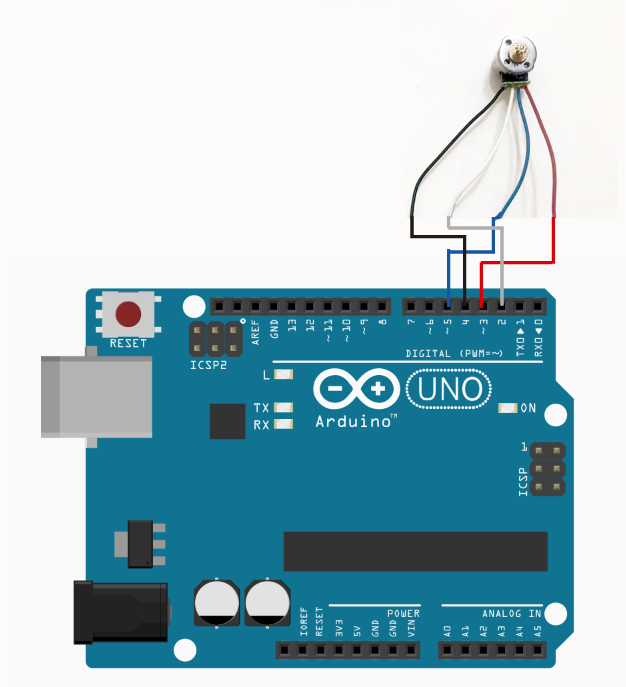
arduino接线:
A+ -> D5
A- -> D4
B+ -> D3
B- -> D2
arduino代码:
版本一:基本版 - 不使用库
#define in_A_1 2 #define in_A_2 3 #define in_B_1 4 #define in_B_2 5 int currentStep = 0; void setup() { pinMode(in_A_1, OUTPUT); pinMode(in_A_2, OUTPUT); pinMode(in_B_1, OUTPUT); pinMode(in_B_2, OUTPUT); } unsigned int time_delay = 200; void step1(){ //A+,B+ digitalWrite(in_A_1, 1); digitalWrite(in_A_2, 0); digitalWrite(in_B_1, 1); digitalWrite(in_B_2, 0); delay(time_delay); } void step2(){ //A+,B- digitalWrite(in_A_1, 1); digitalWrite(in_A_2, 0); digitalWrite(in_B_1, 0); digitalWrite(in_B_2, 1); delay(time_delay); } void step3(){ //A-,B- digitalWrite(in_A_1, 0); digitalWrite(in_A_2, 1); digitalWrite(in_B_1, 0); digitalWrite(in_B_2, 1); delay(time_delay); } void step4(){ //A-,B+ digitalWrite(in_A_1, 0); digitalWrite(in_A_2, 1); digitalWrite(in_B_1, 1); digitalWrite(in_B_2, 0); delay(time_delay); } void tickClock(){ currentStep++; if( currentStep >= 4 ){ currentStep = 0; } int cycle = currentStep % 4; if( cycle == 0 ){ step1(); } else if( cycle == 1 ){ step2(); } else if( cycle == 2 ){ step3(); } else if( cycle == 3 ){ step4(); } } void counter_tickClock(){ currentStep--; if( currentStep < 0 ){ currentStep = 3; } int cycle = currentStep % 4; if( cycle == 0 ){ step1(); } else if( cycle == 1 ){ step2(); } else if( cycle == 2 ){ step3(); } else if( cycle == 3 ){ step4(); } } void clockwise(long st){ long i = 0; while( i < st ){ //step1 step1(); //step2 step2(); //step3 step3(); //step4 step4(); i++; } } void counter_clockwise(long st){ long i = 0; while( i < st ){ //step1 step1(); //step4 step4(); //step3 step3(); //step2 step2(); i++; } } void loop() { //clockwise(18);//counter_clockwise(18); // tickClock(); counter_tickClock(); }
版本二: 调用Stepper库 - 使用arduino Stepper库
#include <Stepper.h> const int stepsPerRevolution = 48; // 根据电动机步数更改此值 Stepper myStepper(stepsPerRevolution, 2,3,4,5); int stepCount = 0; //已经走的步数 void setup() { Serial.begin(9600); } void loop() { if (stepCount < stepsPerRevolution) { myStepper.step(1); Serial.print("steps:" ); Serial.println(stepCount); stepCount++; delay(500); } }
版本三:调用AccelStepper库
#include <AccelStepper.h> #define HALF4WIRE 8 // Motor pin definitions #define motorPin1 2 // A1 #define motorPin2 3 // A2 #define motorPin3 4 // B1 #define motorPin4 5 // B2 // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 //AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5 AccelStepper stepper1 (HALF4WIRE, motorPin1, motorPin2, motorPin3, motorPin4, true); void setup() { stepper1.setMaxSpeed(1200.0); stepper1.setAcceleration(100.0); stepper1.setSpeed(100); stepper1.moveTo(12000); //250 full rotations @ 48 steps each = 12,000 steps }//--(end setup )--- void loop() { //Change direction when the stepper reaches the target position if (stepper1.distanceToGo() == 0) { stepper1.moveTo(-stepper1.currentPosition()); delay(500); } stepper1.run(); }
