机器人学变换笔记
基于固定坐标系下
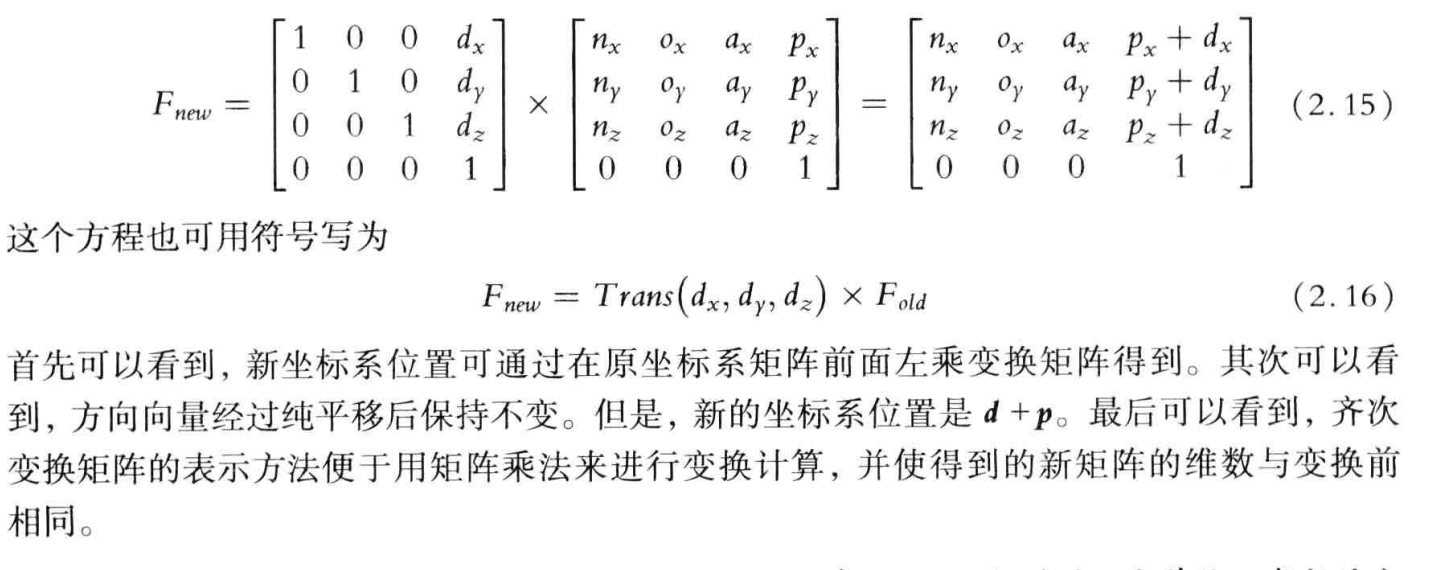
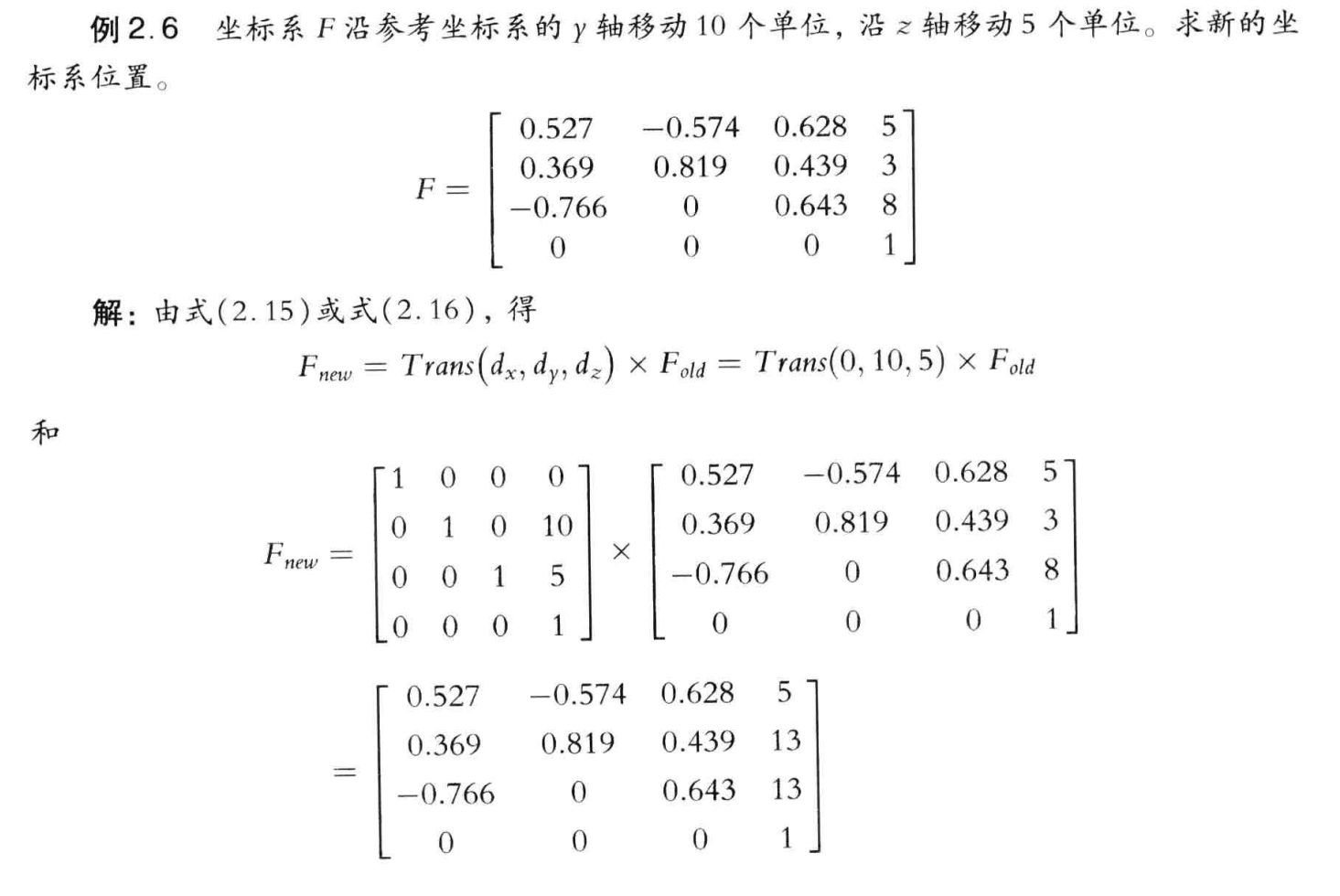
平移变换
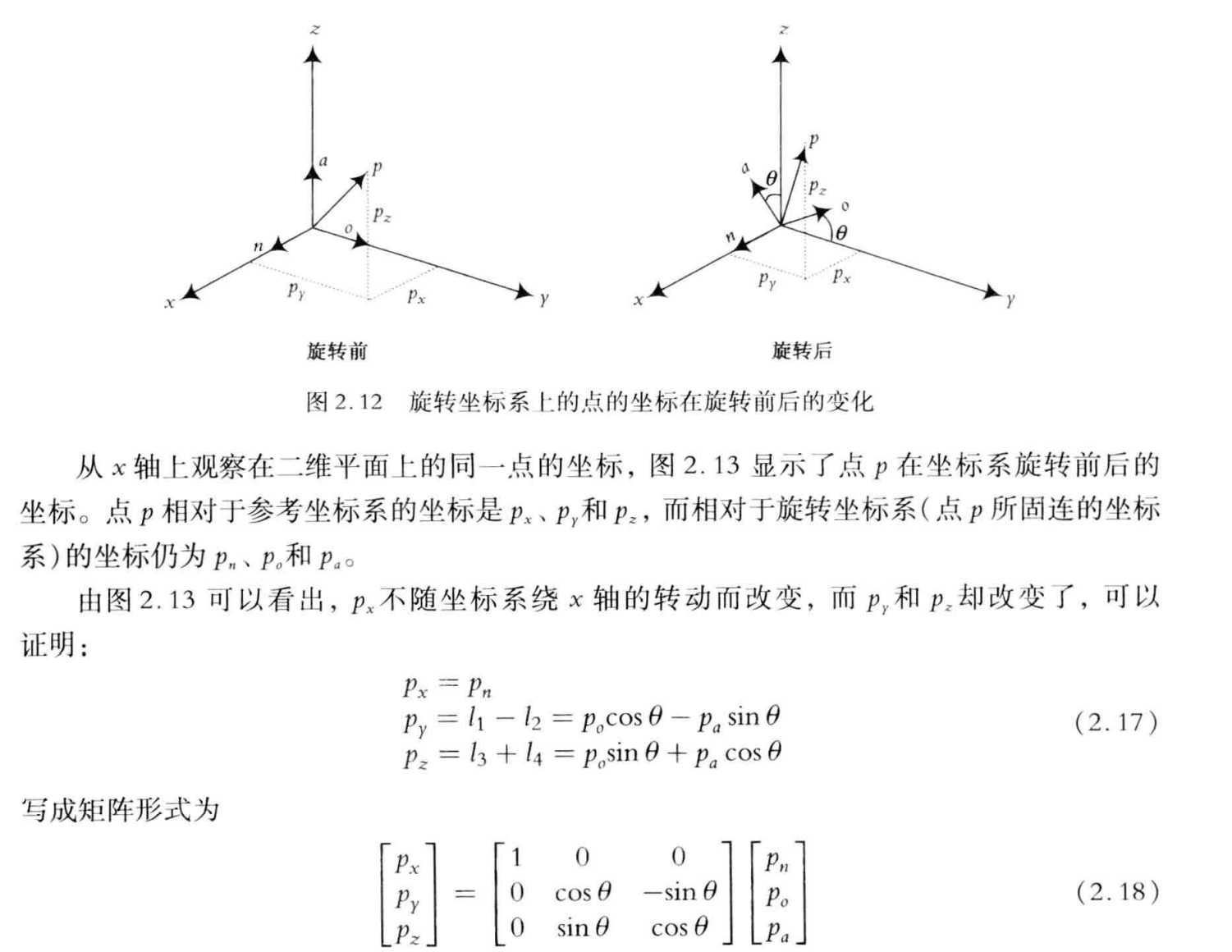
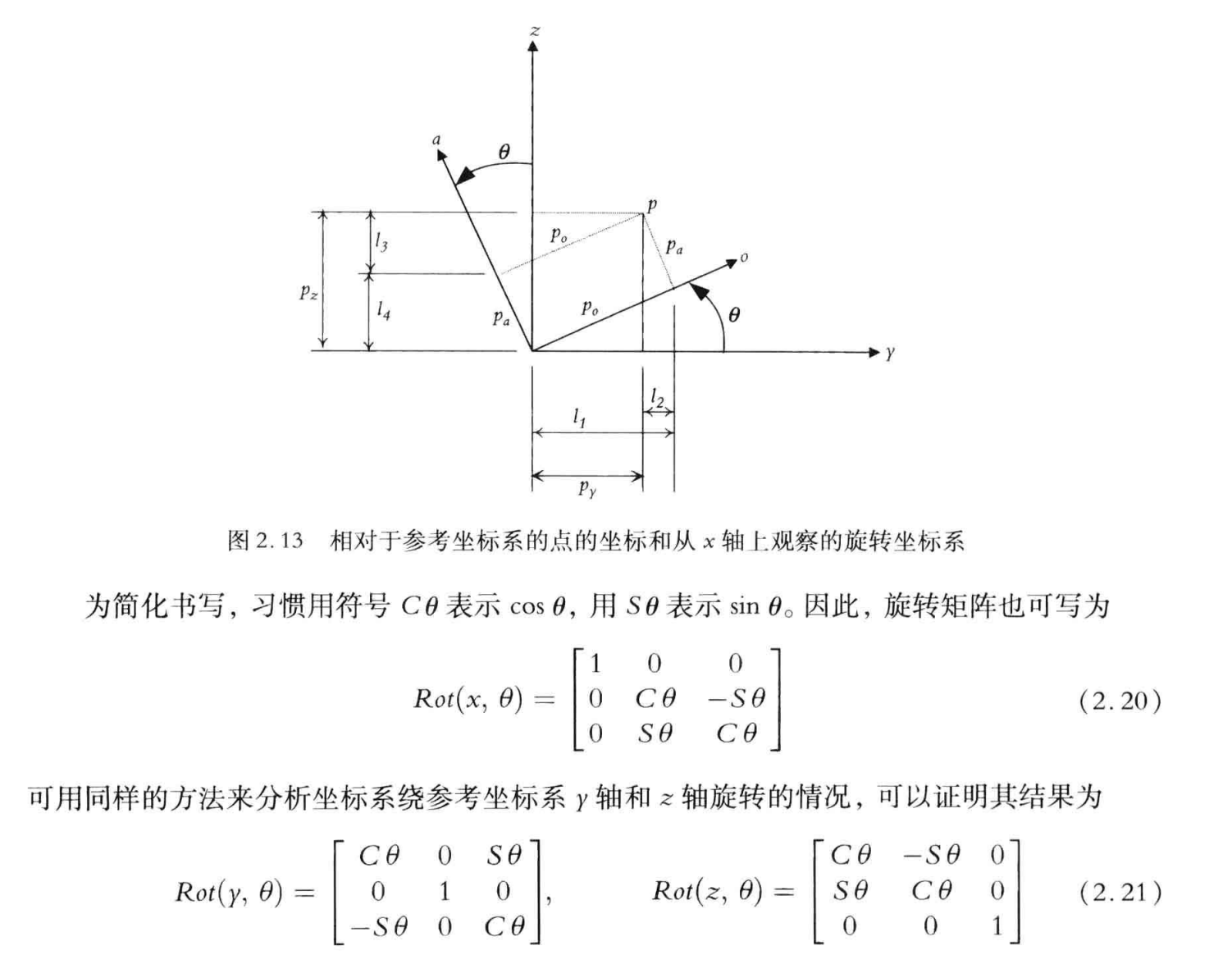
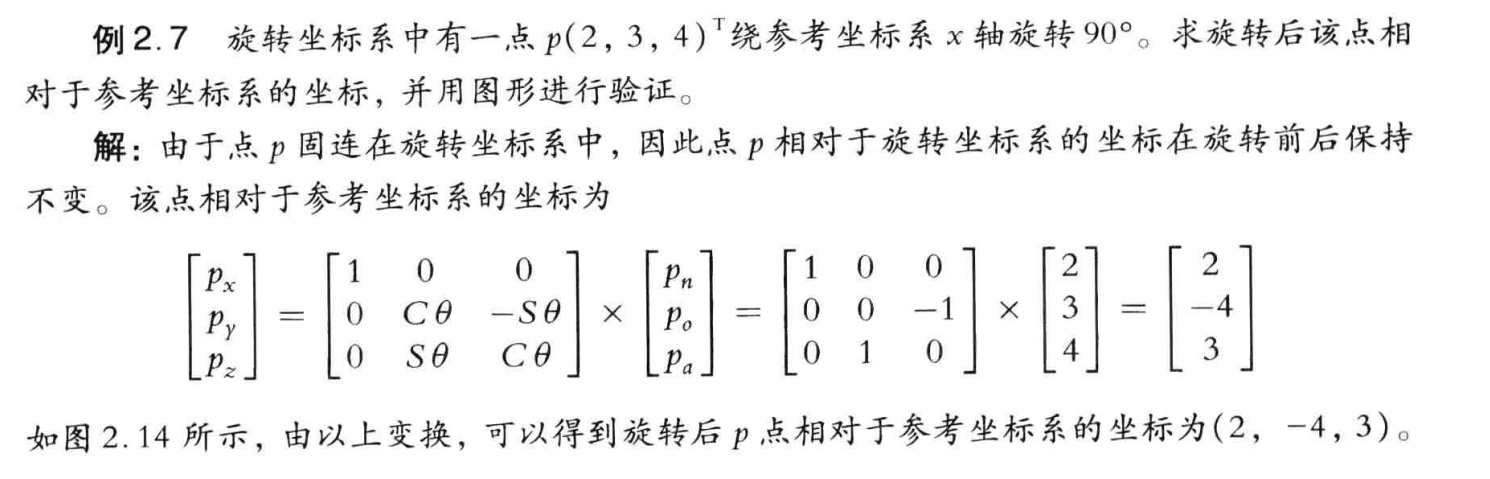
旋转变换
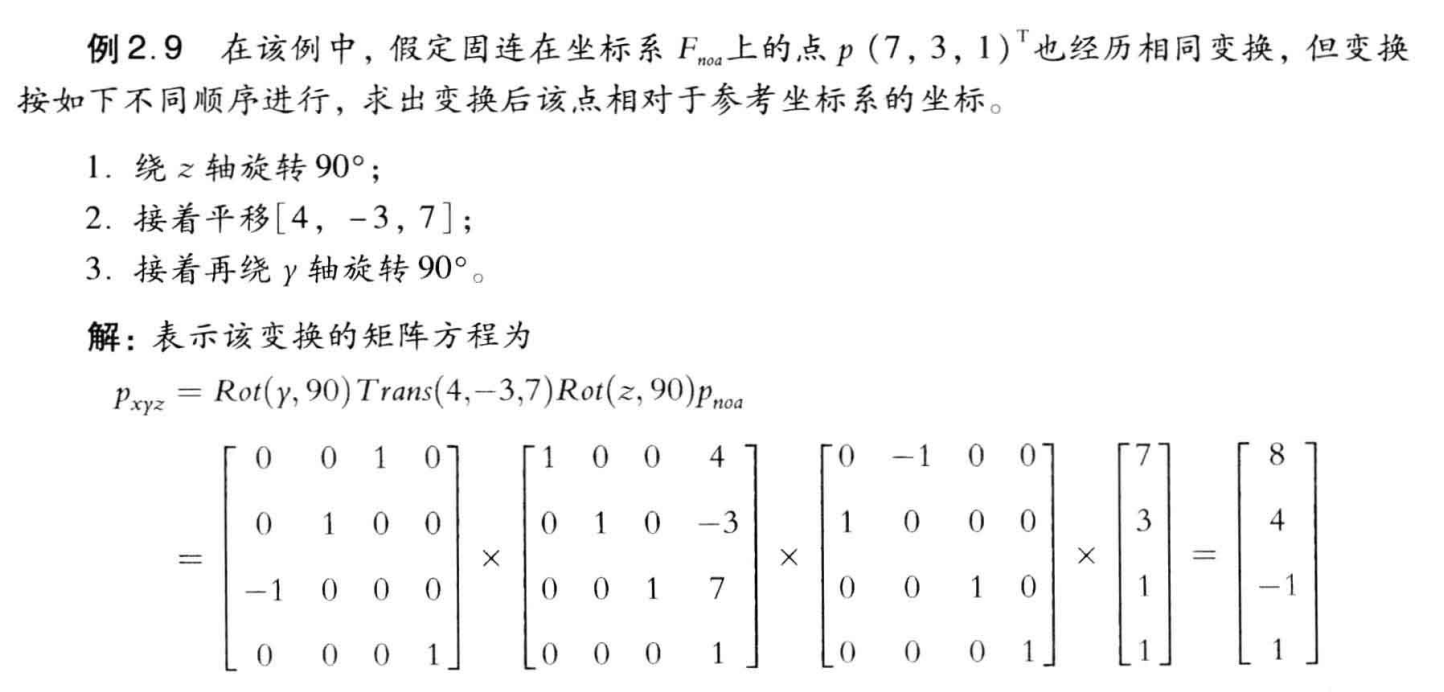
复合变换
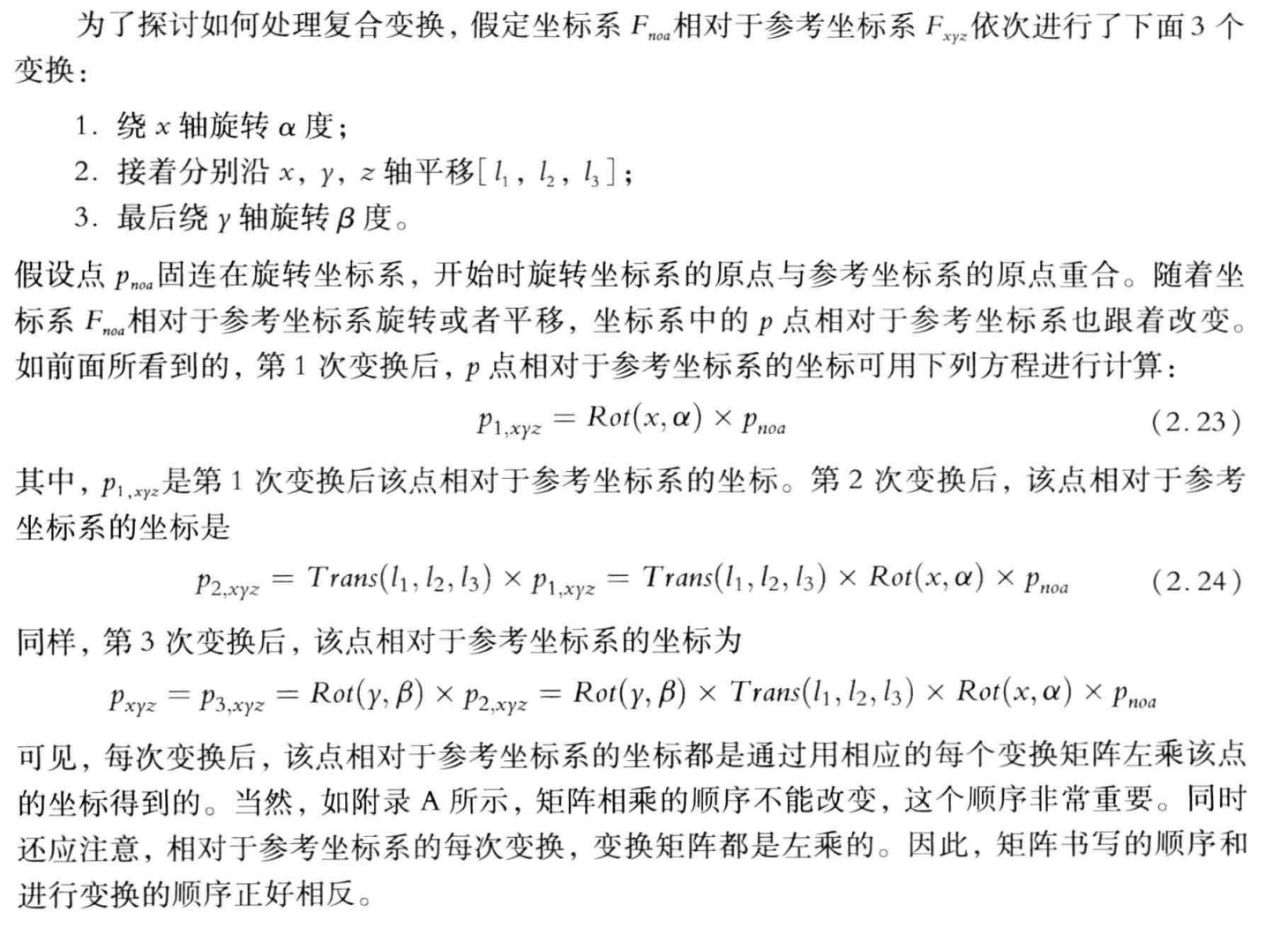
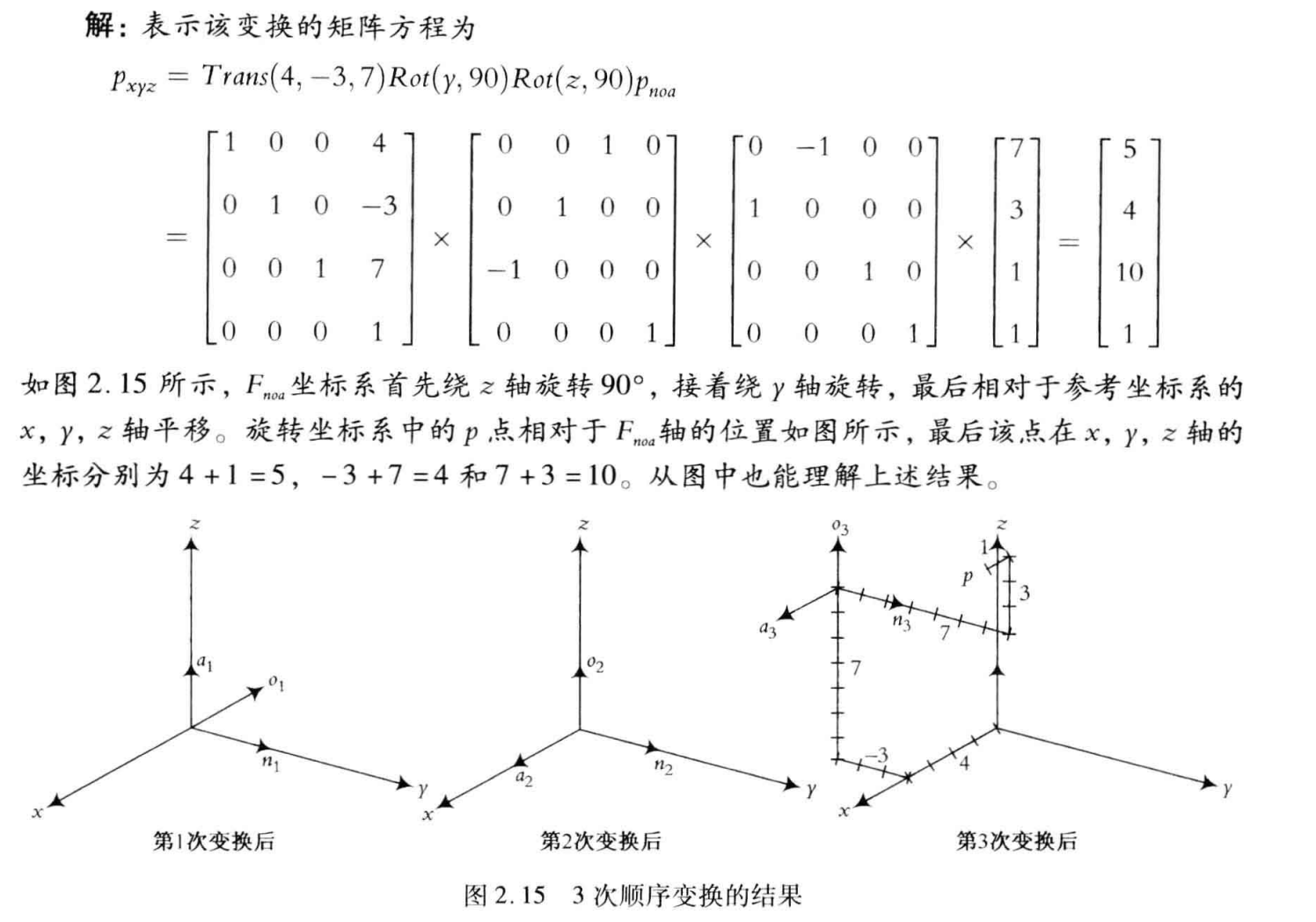
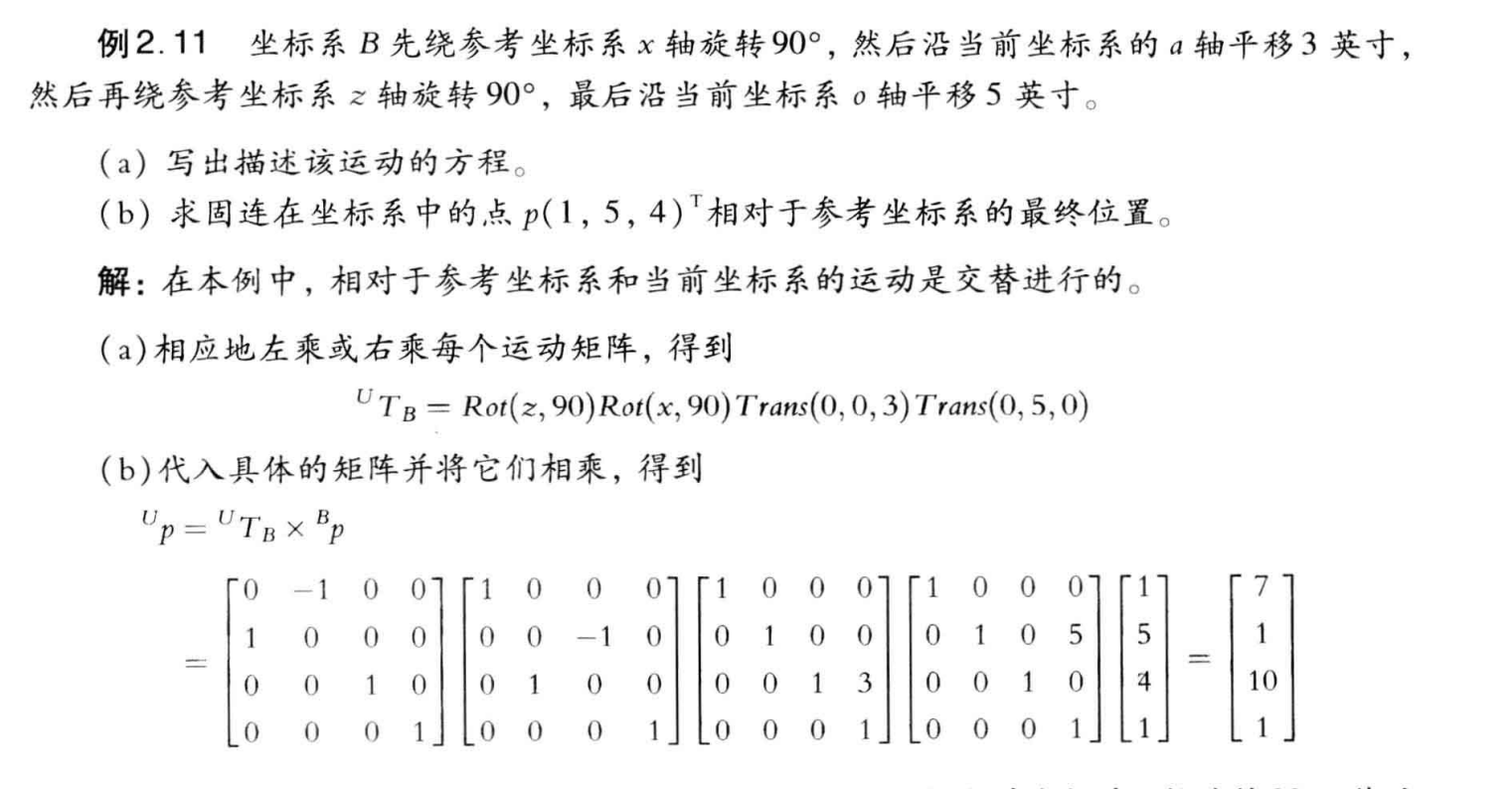
复合变换是由固定参考坐标系或当前运动坐标系的一系列沿轴平移变换和绕轴旋转变换所组成的。任何变换都可以分解为按一定顺序的一组平移变换和旋转变换。例如,为了完成所要求的变换,可以先绕x轴旋转,再沿×、y和z轴平移,最后再绕y轴旋转。在后面将会看到,这个变换顺序很重要,如果颠倒两个依次变换的顺序,结果将会完全不同。
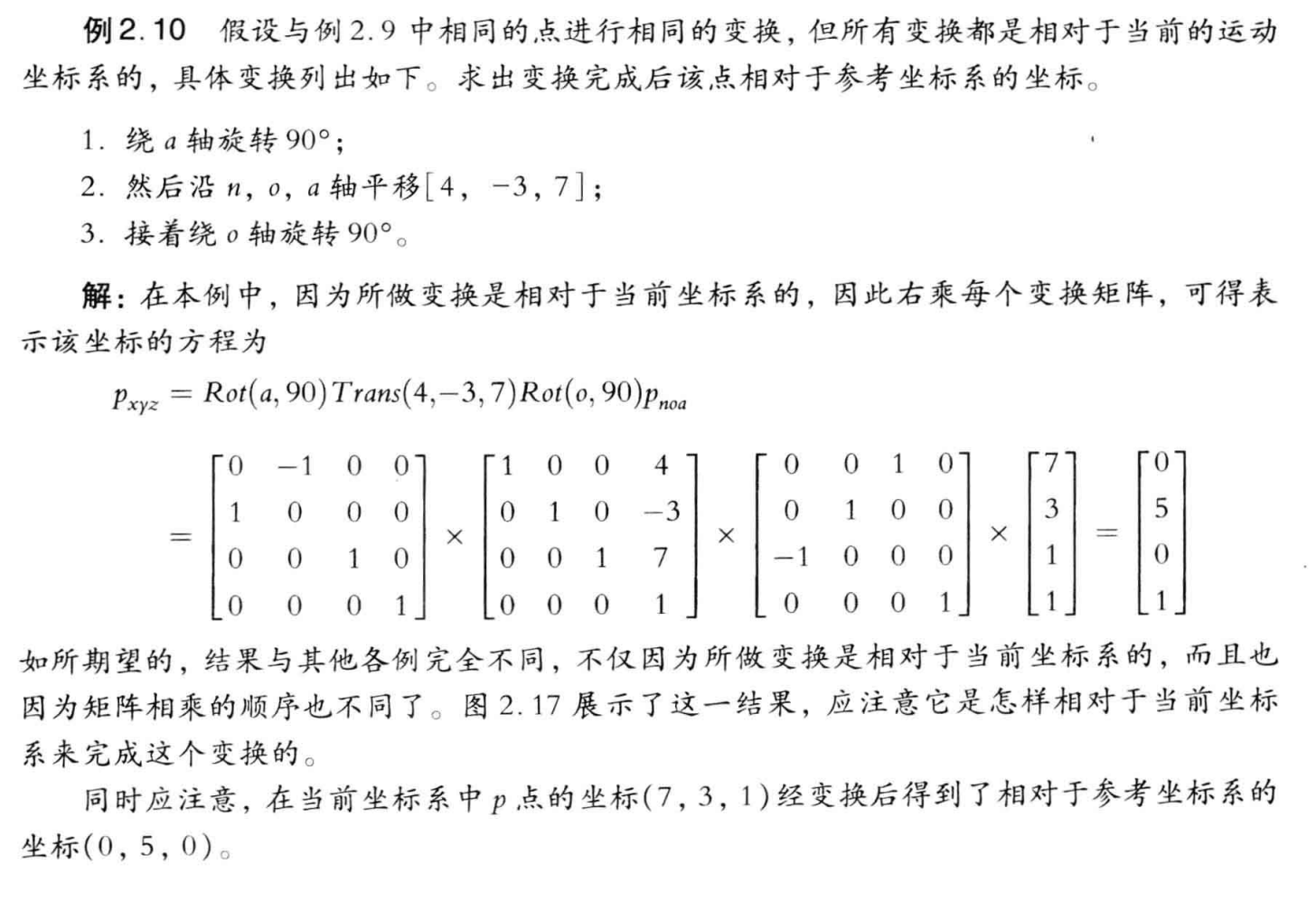
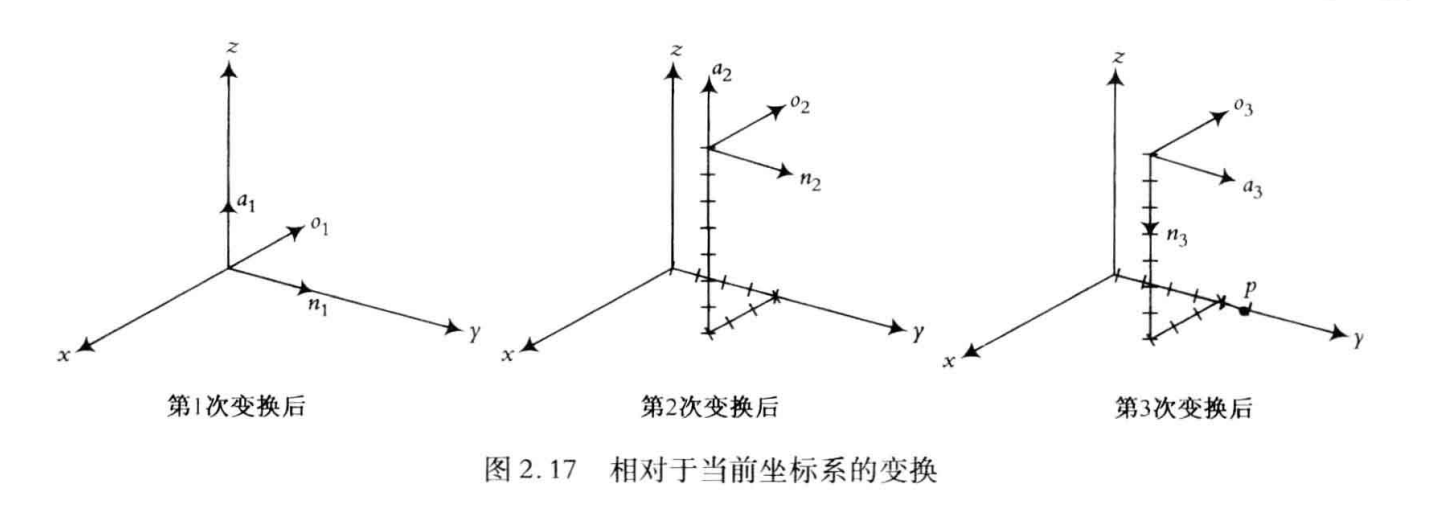
相对于旋转坐标系的变换
到目前为止,所有变换都是相对于固定参考坐标系的。即所有平移、旋转和距离(除了相对于运动坐标系的点的位置)都是相对参考坐标系轴来测量的。然而事实上,也有可能进行相对于运动坐标系或当前坐标系的轴的变换。例如,可以相对于运动坐标系(也就是当前坐标系)的 n 轴而不是参考坐标系的 x 轴旋转 90°。为计算当前坐标系中点的坐标相对于参考坐标系的变化,这时需要右乘变换矩阵而不是左乘。由于运动坐标系中点或物体的位置总是相对于运动坐标系测量的,所以总是右乘描述该点或物体的位置矩阵。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号