三维点云目标提取
1.前言
不知不觉,已经到了研究生的第三年了,明年就要毕业参加工作了,offer拿了几个,基本的工作也差不多定下来了,毕竟研究生两年时间主要研究方向是三维点云的目标识别及三维重建(姑且认为是研究方向吧),正如国内的研究生境遇一样,几年的光辉时间都奉献给了导师的几个项目,做的东西也毕竟杂,精通的技能也谈不上,乘着要毕业的时节,现奉献一下鄙人对三维点云目标识别的一些看法(应该只适合给刚接触搞三维点云的小硕们看,不过貌似国内搞这一块的高校也不是很多啊)。
2.三维激光点云应用领域
三维激光点云的获取原理以及基本特征就不介绍了,比较涉及到比较专业的知识,就谈谈三维激光点云的应用吧。
个人觉得,三维激光的应用前景是非常广的,特别是与其他传感器结合起来,如图像传感器等。应用领域包括但不限于:智能驾驶,智能家居,三维重建,数字地球,城市规划,防灾减灾,海洋测绘等等。只讨论两个例子:智能驾驶以及三维重建。
2.1智能驾驶
智能驾驶是需要高精度3D地图的,什么叫高精度3D地图,就是能够表现车道级别的地图,包括车道线,标线,道路参数等等信息。
2.2 三维重建
三维重建一般是对三维点云进行mesh构网得到的,当然也可以通过结构化进行重建。
好了,从以上一些应用来说,三维点云的研究是非常有意义的。但是实际上,我们从传感器获取的三维点云并没有对象,只是一堆算乱的三维点而已。
但是,在以上应用中,算乱的点云是没法进行处理的。就比如三维重建,如果没有对象化的目标,对整个点云进行重建,最终的结果就是,有一个很好看的整体模型,但也仅限于好看而已,你并不知道这个模型里面有多少建筑物,多少树,地形如何,你更不知道具体建筑物的具体位置等等信息。所以说,三维点云的对象化是非常重要的,是其他应用的基础。
好了,就说这么多,下一节再讲讲目标提取这个正题吧。

3.三维点云目标提取
3.1一般流程
先根据个人认识总结一下目标提取的一般性步骤:
如上所示,三维点云的目标提取关键性的两步即为:特征提取与选择、分类,是不是整个方法流程与图像中的目标识别有点像。本质上看,凡是涉及到目标识别,其方法流程大体是相同的。为什么要搞特征提取,因为我们要识别的目标一般是在一个大场景下,各种目标相互混杂,既然要对某个目标进行识别,当然就需要有一个指标或者数值来最大化不同目标之前的区别,这个指标或者数值就是所谓的目标特征了。所以我们在对目标进行识别时,往往要采用适合本目标的特征。就比如说图像识别中的卷积神经网络CNN,为什么它比用传统通过手工设计的特征进行识别的识别率要高一大截,本质原因就是CNN的特征是通过学习得到的,而且特征表示与分类器是联合优化的。分类器就不累赘了,SVM、boosting、决策树等等。
3.2特征提取
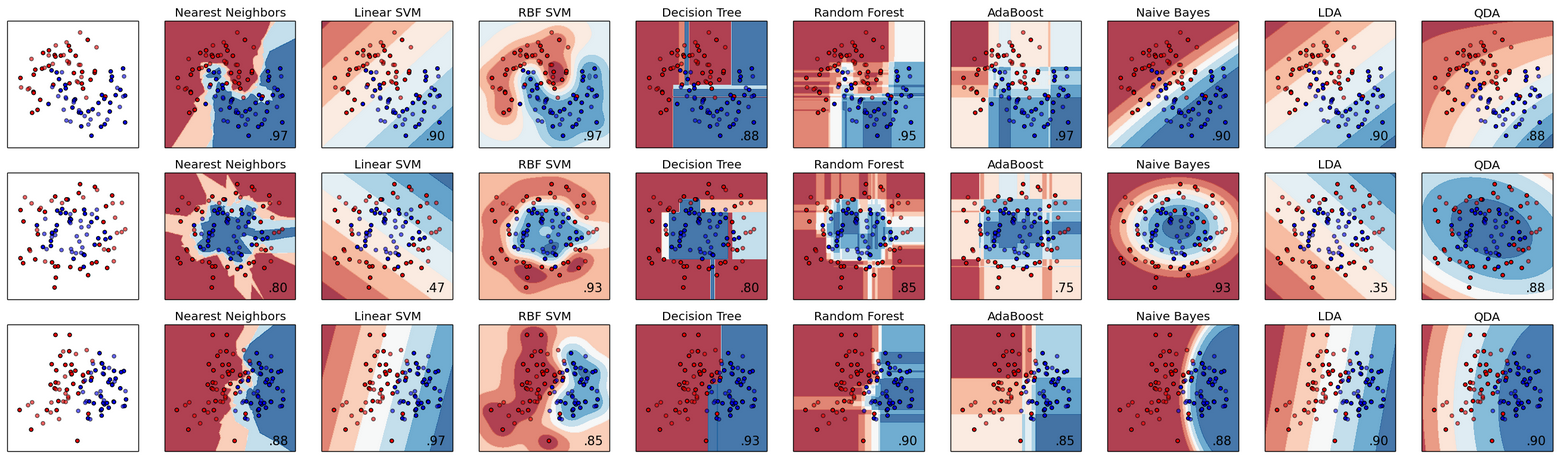
特征提取的重要性从以上就可以看得出来了,它是最终结果能不能满足预期的最重要因素。来看看分类器的不同对结果的影响:
以上的分类器分别为最近邻、决策树、二次判别分析、SVM,所使用的特征是相同的。从结果中可以简单的得出结论,影响目标识别的决定性因素肯定就是特征提取了。其实这也是我理解为什么CNN用的softmax分类器的原因,就是影响结果的不是分类器,而是特征。
好了,总结一下三维点云的特征吧。
<1>2D特征
2d几何特征:半径、点密度、面积…
2d局部形状特征
基于累积图的特征:格网点数、高程差、高程标准差…
<2>3D特征
3d几何特征:半径、高程差、高程标准差、点密度
3d局部形状特征:线性特征、平面特征、散乱特征、总方差、各向异性、特征熵、特征值和曲率…
<3>纹理特征
RGB 强度
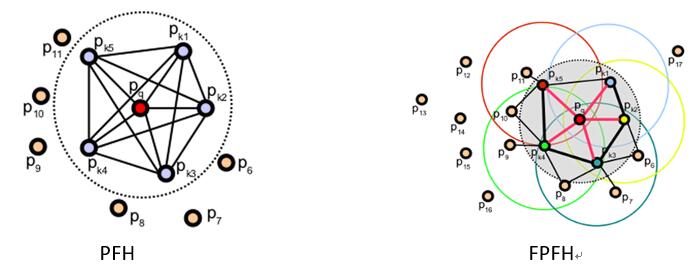
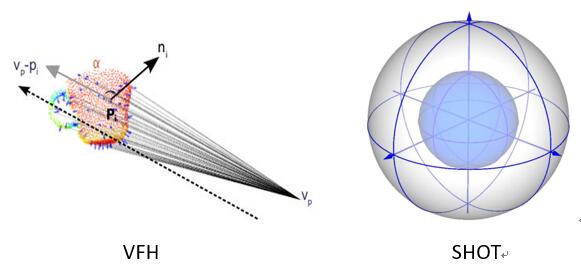
<4>统计图特征
点特征直方图PFH、快速点特征直方图FPFH、视点特征直方图VFH,Signature
of Histograms of OrienTations(SHOT)
<5>其他
Spin images,Global FPFH,Global Radius-based Surface Descriptor(GRSD),GlobalStructure Histogram(GSH)
3.3 分类器
分类器这个还是省略吧,仅凭大家所热衷的啦,对结果提升不大,以下是一些常用的分类器:
4.总结
三维点云目标提取个人觉得还是很有研究前景的,毕竟目标整体的识别率不是很高,还有很多需要改进的地方。如前所说,影响整个结果的其实就是特征提取这一步了,个人觉得可以从这一步出发来进行研究,本人也做过一些相关实验,就是结合深度学习,(有时间的话可以介绍介绍这一块)参阅了一些国外主流期刊,貌似做的人不多。还有一点,个人觉得最好是将三维点云与其他传感器得到的数据进行融合来研究,特别是图像,研究的价值绝对是杠杠的。如果想知道一些具体的研究成果,大家可以去主流期刊看看,当然也可以问我啦,或者需要什么资料也可以啦,为国家做做贡献~~~


 浙公网安备 33010602011771号
浙公网安备 33010602011771号