


Shadow Map 原理和改进 【转】
http://blog.csdn.net/ronintao/article/details/51649664
参考
1、Common Techniques to Improve Shadow Depth Maps
2、Tutorial 16 : Shadow mapping
写在前面
之前已经很久没有再更新博客,上一篇已经是3年前的记录了,当时还比较菜(现在当然仍然菜),所以写的东西大多不是很好……
这期间其实也学了很多新的东西。学习中比较痛苦的一点,是经常发现所学的东西要么就只有一个大意的原理讲解,不会特别深入;要么就是只有一个实现的简单方法,不知道所以然(国内的资料很多是这样);能够两者兼顾的通常是比较难啃的英文资料,隔一段时间回去再翻阅,由于语言问题又需要花比较长的时间;另外一个问题就是各个相关知识点比较散落,不方便融汇贯通来看。
因此,又产生了回来重开博客,进行汇总的想法。
另外回来重新翻阅之前的博客,发现多了很多留言,以后慢慢的回复填坑吧……
一、shadow map 原理
shadow map是一种常用的实时阴影的生成方法。通常用来生成平行光(direction light)的阴影。点光源也可以用,不过要更加复杂一些(称为 omnidirectional shadow maps,生成的是 cubemap,如果我会填坑的话,会在以后讲到)。
说到 xx map,第一反应当然是会生成并利用某种纹理。没错,shadow map的核心就是要生成并利用 shadow depth map。下面具体来说。
1、阴影算法的任务
shadow map(以及shadow volume)等shadow算法,到底是做什么的?这其实是需要解决的第一个问题。这些阴影算法的核心,实际上就是要针对任意给定的一个物体片段点(fragment point),鉴定出它是否处在阴影之中。
所以阴影算法,归根结底是要给出这样一个函数:
- bool ShadowAlgorithm(vector3 fragmentPoint) {
- if ( IsInShadow(fragmentPoint) )
- return true;
- else
- return false;
- }
各种不同的阴影算法,实际上就是“是否在阴影中”的鉴别方法不同。
2、阴影产生的自然原理
什么样的点是在阴影中的?看看下面这张图
图1、阴影(图中橘黄色的是不透明的物体)
在平行光的照射下,直觉的可以知道,点A、点D在阴影之外,而点B、点C在阴影之中。直觉判断的依据,就是由于光线的直线传播特性,一旦遇到遮挡,就会产生阴影。换言之,对于光线来说不可见的点,就是在阴影中的点。
那么上面的判断函数 IsInShadow,就可以进一步写为如下的伪代码:
- bool IsInShadow(vector3 fragmentPoint) {
- return !IsVisibleToLight(fragmentPoint, mLight);
- }
其中 mLight是需要生成阴影的平行光,fragmentPoint是需要进行判断的片段点。
3、基于自然原理的提炼:light space 的 shadow depth map
一提到这种可见性的判定,自然的就会想到 depth test。我们站在光源的位置,按照光线传播的视角,观察场景,计算场景中的物体距离光源的距离(也就是该视角下的深度),并记录各个位置上的最小值(即距离光源最近的点的位置),从而获得一张 shadow depth map。
其实,上面的流程和普通的camera获取depth map的流程是基本一样的,只是要改换到光源位置来观察而已。
4、应用到场景中:利用 shadow depth map
获取了 shadow depth map之后,就要利用它来进行鉴别。根据第2小节的讨论,可以知道,如果某个点,其在光源视角下的 depth 大于 shadow map中对应位置的 depth,则意味着它被某个物体遮挡,因此是在阴影中的;反之则不在阴影之中。
所以,对于世界中的某个点 p,我们只要将其转移到 light space ,比较他在light space下的depth,就可以判定它是否是在阴影之中了。
二、基本的shadow map流程
根据第一章的讨论,可以大致梳理出流程,下面逐步来说:
1、在light space 摆放 camera
1)投影方式
camera的投影方式有两种:orthographic 和 perspective。那么应该使用哪一种呢?
这就牵涉到shadow map的原理:以光源的角度观察世界。由于我们这里使用的是平行光,所以它眼中的世界是没有透视关系的,因此应该使用 orthographic。而如果使用的是点光源,那么就应该使用 perspective了。
2)视锥体(frustum)
确定了投影方式为 orthographic 之后,就要确定它的视锥体。显然我们需要将view视角下所有物体都包含到视锥体中,但是过大也没有意义,会引起不必要的渲染开销,另外也可以更充分的利用shadow depth map。
这里有两种方式(这一小节的图,全部来自于微软的网站):
a. Fit To Scene
图2、任意指定的视锥体和 fit to scene 设定下的视锥体
左边是一个任意设定的视锥体,里面的梯形是view视角的frustum,右边是调整shadow frustum,使他正好包含整个scene的情况。
可以看到,如果按照左边的设置,视锥体中有一部分区域是完全空着的,那么截取出的 shadow depth texture,对应的这一部分也就完全为空,因而利用率更低。另一方面,左边的视锥体远近平面距离较远,由于深度取值实际是转换到 0~1 范围内的,这就意味着有部分值域是利用不上的,那么深度值的精度也被降低了。
那么,如果给定场景的AABB,如何确定灯光的frustum?如果当前light space的只需要将该AABB的顶点转移到light space,然后取出 xmin,xmax,ymin,ymax,zmin,zmax。由于camera 的观察视野由 x y分量确定,观察的深度由z确定,因此将camera摆放在x,y的中心点,size取其半径的较大值,然后将zmin设置为near,zmax设置为far即可。
例如下面 unity 的代码,lightCamera就是我们摆放在灯光处的camera
- private void FitToScene() {
- List<Vector3> aabbBounds = GetSceneAABBCorners(sceneObject);
- float xmin = float.MaxValue, xmax = float.MinValue;
- float ymin = float.MaxValue, ymax = float.MinValue;
- float zmin = float.MaxValue, zmax = float.MinValue;
- foreach (Vector3 cornerPoints in aabbBounds) {
- Vector3 pointInLightSpace = transform.worldToLocalMatrix.MultiplyPoint(cornerPoints);
- xmin = Mathf.Min(xmin, pointInLightSpace.x);
- xmax = Mathf.Max(xmax, pointInLightSpace.x);
- ymin = Mathf.Min(ymin, pointInLightSpace.y);
- ymax = Mathf.Max(ymax, pointInLightSpace.y);
- zmin = Mathf.Min(zmin, pointInLightSpace.z);
- zmax = Mathf.Max(zmax, pointInLightSpace.z);
- }
- float xsize = (xmax - xmin)/2;
- float ysize = (ymax - ymin)/2;
- float zsize = (zmax - zmin)/2;
- lightCamera.transform.localPosition = new Vector3((xmin+xmax)/2, (ymin+ymax)/2, 0);
- lightCamera.orthographicSize = Mathf.Max(xsize, ysize);
- lightCamera.nearClipPlane = zmin;
- lightCamera. farClipPlane = zmax;
- }
b. Fit to View

图3、fit to view设定下的视锥体
这种方法是调整视锥体使他正好包含view frustum。可以看到在左边的情况下,其表现非常好,只需要包含很少的区域,右边的情况对比fit to scene则有得有失。
值得注意的是,view 视角下的阴影,并不一定完全由view视角内包含的物体产生,可以看下面这张图,view视角很小的情况下就会出现问题。

图4、fit to view在view frustum很小时的阴影丢失
因此在实际使用中,是使用灯光的无穷远视锥体和view frustum 以及场景的AABB盒的交集来做的

图5、综合使用scene 与 view frustum 来解决阴影丢失
另外这种方法还有个问题在于视锥体的确定和view frustum产生了关联。只要观察视角变动,则截取尺寸就有可能变化,而在 fit to scene情况下,则是相对固定的。
这种情况的代码与上面的差别不大,可以看到near 和 far clipplane仍然取决于scene,而size则完全取决于view frustrum
- private void FitToView() {
- List<Vector3> sceneAABBBounds = GetSceneAABBCorners(sceneObject);
- List<Vector3> viewAABBBounds = GetViewCorners(viewCamera);
- RoninBound3D sceneBound = GetBoundInLightSpace(sceneAABBBounds);
- RoninBound3D viewBound = GetBoundInLightSpace(viewAABBBounds);
- lightCamera.transform.localPosition = new Vector3(viewBound.XCenter, viewBound.YCenter, 0);
- lightCamera.orthographicSize = Mathf.Max(viewBound.XSize/2, viewBound.YSize/2);
- lightCamera.nearClipPlane = sceneBound.zMin;
- lightCamera. farClipPlane = sceneBound.zMax; }
其中获取场景AABB的由于比较简单这里就不给出,获取perspective camera的边角稍微麻烦一点,在unity中代码如下:
- private List<Vector3> GetViewCorners(Camera cam) {
- // in unity, the fov is the vertical field of view; horizontal FOV varies depending on the viewport's aspect ratio. Field of view is ignored when camera is orthographic (see orthographic).
- List<Vector3> corners = new List<Vector3>();
- float ySizeNear = cam.nearClipPlane * Mathf.Tan(cam.fieldOfView/2 * Mathf.Deg2Rad);
- float xSizeNear = cam.aspect * ySizeNear;
- float ySizeFar = cam.farClipPlane * Mathf.Tan(cam.fieldOfView/2 * Mathf.Deg2Rad);
- float xSizeFar = cam.aspect * ySizeFar;
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( xSizeNear/2, ySizeNear/2, cam.nearClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( -xSizeNear/2, ySizeNear/2, cam.nearClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( xSizeNear/2, -ySizeNear/2, cam.nearClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( -xSizeNear/2, -ySizeNear/2, cam.nearClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( xSizeFar/2, ySizeFar/2, cam.farClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( -xSizeFar/2, ySizeFar/2, cam.farClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( xSizeFar/2, -ySizeFar/2, cam.farClipPlane)) );
- corners.Add( cam.transform.localToWorldMatrix.MultiplyPoint(new Vector3( -xSizeFar/2, -ySizeFar/2, cam.farClipPlane)) );
- return corners;
- }
以上的代码还有另外一个问题,view camera的frustum有时far clip会非常的大,导致view frustum 的aabb非常的大,包含了大量不需要的信息。所以在实际使用中,可以先获取view camera的max depth,然后再进行计算(当然可能还有更好的方式)
2、截取 shadow depth map
1)texture size
要将shadow depth map保存为多大尺寸的纹理是个非常重要的问题。尺寸越大,包含的信息越多,当然越精确,但是消耗的内存也越多。尺寸太小会引发锯齿问题。这里先不展开讨论,在后面的部分会详细讲到。
2)编码方式
texture size体现的是位置的精确度,而该像素点上的值,则是其深度值的精度。如果仅仅利用纹理像素中的一维,则精度显然不够高,而且十分浪费。所以可以通过编码的方式,将其四位(RGBA模式下)统统利用起来。
例如unity中的 EncodeFloatRGBA
- // Encoding/decoding [0..1) floats into 8 bit/channel RGBA. Note that 1.0 will not be encoded properly.
- inline float4 EncodeFloatRGBA( float v )
- {
- float4 kEncodeMul = float4(1.0, 255.0, 65025.0, 16581375.0);
- float kEncodeBit = 1.0/255.0;
- float4 enc = kEncodeMul * v;
- enc = frac (enc);
- enc -= enc.yzww * kEncodeBit;
- return enc;
- }
在需要取出的时候再进行解码:
- inline float DecodeFloatRG( float2 enc )
- {
- float2 kDecodeDot = float2(1.0, 1/255.0);
- return dot( enc, kDecodeDot );
- }
这样就提高了深度值的精度。
3、开始渲染阴影
对于一般的物体,那么直接渲染即可,而对于一些透明的物体,或者需要特殊处理的物体,则可以在这一步再做点文章。
比如说对于一些透明的物体,只希望他的边界处产生阴影,则可以只对他的边界处记录Z值。
这里会在以后补全(希望我会填这个坑)
4、对于每个点,转到 light space ,转换矩阵的确定
首先要明确的是转换的目的。上面截取的 depth map 是在 light space 中获得的,那么对于场景中任意的一点,就需要知道他在light space中的位置。
那么和view space中的 mvp 转换一样,这里也需要转移到light space 的 mvp 矩阵。
在unity中这几个矩阵其实可以直接获取,不过在《Unity 3D ShaderLab开发实战详解》中的第13章中有出现一个具体的矩阵,但是这个矩阵有一些问题(这是一本充满bug的好书),因此在这里额外讨论一下这个矩阵如何确定。
这里我们分别对m、v、p进行讨论:
1)model矩阵:local -> world
显然,light space 和 view space 所面对的世界是一样的,那么将坐标从 local 坐标系转换到 world 坐标系的 model 矩阵就是相同的。那么在unity中,在shader中直接使用 _Object2World 矩阵就可以了
2)view矩阵:world -> view
在unity中可以直接获取这个矩阵,使用 Camera.worldToCameraMatrix 即可。而在《实战》一书中,使用的是灯光的Transform.worldToLocalMatrix。
乍一想,这两个矩阵的功效应该相同:对light space来说,所谓的view space,其实不就是灯光看到的世界吗,那不就是灯光本地的世界吗?
然而将这两个矩阵打印出来,会发现在Z 轴方向有符号上的差异。
详细的讨论可以参考 unity, 相机空间 与 相机gameObject的局部空间 这篇文章。其实问题的本质就在于unity中的坐标系是左手坐标系,而camera view坐标系是右手坐标系。所以在z轴上发生了方向的反转,这样的反转之后,camera所见的物体 z < 0,且越远,z越负。
因此,这里需要使用 Camera.worldToCameraMatrix 来获取view矩阵,或者使用对角矩阵[1, 1, -1, 1]左乘 Transform.worldToLocalMatrix。两者得到的结果是相同的。
3)projection 矩阵:view -> projection
在unity中可以直接从 Camera.projectionMatrix 中获取。
《实战》一书中,在light处放置的是一个perspective的camera,所以其投影矩阵是透视投影,他这里给出的矩阵有比较多的错误。
这里的求法可以参考我之前的博客《【OpenGL】02 - OpenGL中的坐标系》 最后的结论:
在unity的官方手册上也有相同的公式,可见链接最下面的范例。
由于实际使用中,camera处在view space的原点,因此
- Right - Left = WidthAtNearClip;
- Top - Bottom = HeightAtNearClip;
- Right + Left = 0;
- Top + Bottom = 0;
而在近平面的 width 和 height 可以由camera 的 fov、aspect和near求取出来:
- float fov = c.fieldOfView;
- float n = c.nearClipPlane;
- float f = c.farClipPlane;
- float aspect = c.aspect;
- float heightAtNear = 2 * n * Mathf.Tan(fov / 2f * Mathf.Deg2Rad);
- float widthAtNear = aspect * heightAtNear;
将这个结果带入原矩阵,并定义
- float d = 1 / Mathf.Tan(fov / 2f * Mathf.Deg2Rad);
则得到
这样求出的投影矩阵,和Camera.projectionMatrix是相等的。
但这个矩阵仍然不能直接使用,需要根据GPU情况再进行处理(这里的原理我并不清楚,期待今后可以补完),还需要使用
- GL.GetGPUProjectionMatrix(c.projectionMatrix, false)
才能够得到shader中使用的投影矩阵。
4)正投影的投影矩阵
仍然可以使用 Camera.projectionMatrix 然后使用 GL.GetGPUProjectionMatrix 转换后得到。具体的 Camera.projectionMatrix 矩阵计算方法依旧可以参考我之前的博客 《【OpenGL】02 - OpenGL中的坐标系》
5)correction矩阵
注意到《实战》一书中,还有一个correction矩阵,这个矩阵是做什么的?
一个顶点,经过MVP变化之后,其xyz分量的取值范围是[-1, 1],现在我们需要使用这个变化过的顶点值来找到 shadow depth map中对应的点来比较深度,即要作为UV使用,而UV的取值范围是[0, 1],所以需要进行一个值域的变换,这就是这个矩阵的作用。
需要注意的是,要使这个矩阵成立,该vector4的 w 分量必须是 1。在shader中运算的时候必须注意。
5、将上面求得的转换矩阵赋值给shader
在unity中,可以使用下面的代码来达到效果。
- Shader.SetGlobalMatrix("LightMV", matrix);
在后面的实践中,有时我们还需要传递数组给shader,这个特性在目前的版本(5.3)中还不支持,从官网的论坛上来看,将在5.4中支持该特性。
6、在物体的shader中进行深度比较,来确定阴影
到了这一步,就只需要简单的比较深度就可以了,当然这里也是可以扩展的改善的,后面的bias里面我们会谈到。
7、基础shadow map的代码
代码可以参考附例中的 " 01 Basic ShadowMap",可以看到综合的流程。
三、对这个流程的一些思考
除了上一章中对于每个独立步骤的讨论之外,对于流程整体,这里还有一些思考。
1、对静态平行光源,shadow depth map 可以预生成吗?
如果场景中需要投射阴影的物体是静态的,且不使用fit to view时是可以的。
2、多个光源要怎样处理?
现在针对单个光源,是放在main pass中执行的,对于多个光源,则每个光源都需要有自己独立的depth map,以及自己的转换矩阵,在shader中分别处理。可以写在一个pass中,也可以分散到多个pass(类似于forward add,其实感觉forward add是最合适的处理位置)。
现在我们已经完成了基础的shadow map。但是现在的效果还很难让人满意,所以还需要很多改进。下面我们针对问题逐个来看。
四、问题一: Shadow Acne && Self Shadowing
1、现象
在任何改进措施都不采用的情况下,运行 " 01 Basic ShadowMap",会看到一张惨不忍睹的画面(当然,阴影还是有的)
图6、无改进的shadow map中的shadow acne
更常见的情况是下图左边这样的锯齿状条纹:

图7、条纹状的shadow acne
这种现象,就被称为 Shadow Acne 或者Self-Shadowing
2、原因
Shadow Mapping 里的 Shadow acne 一节解释的比较清楚,根本原因就是 shadow depth map 的分辨率不够,因此多个 pixel 会对应 map 上的同一个点。
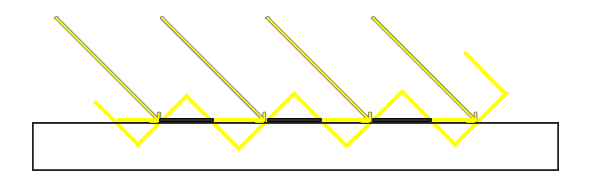
图8、shadow acne成因图
图中黄色箭头是照射的光线,黑色长方形是实际物体表面,黄色的波浪线是 shadow map中的对应值的情况。
可以看到,由于map是对场景的离散取样,所以黄色的线段呈阶梯状的波浪变化,相对于实际场景中的情况,就有一部分比实际场景中的深度要大(对应着黑色线段部分),着部分不会产生阴影(注意图画反了);一部分比实际场景中的深度要小(对应着黄色线段部分),这部分会产生阴影,所以就出现了条纹状的阴影。
由于这种情况,是物体的实际深度,与自己的采样深度,相比较不相等(实际深度大于采样深度)导致的,所以可谓是自己(采样的副本)遮挡了自己(实际的物体),所以被称为 self shadowing。
3、对策
解决的方法很简单,其实只有实际深度大于采样深度的时候才有问题,那么我们在计算实际深度的时候,往灯光方向拉一点,让他减小一点就可以了
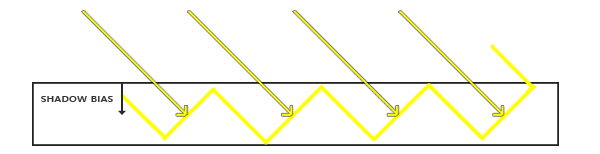
图9、shadow acne的对策:Shadow Bias
这就是shadow bias的原理,具体怎么做,我们后面来看。
五、问题二:Peter Panning
1、现象
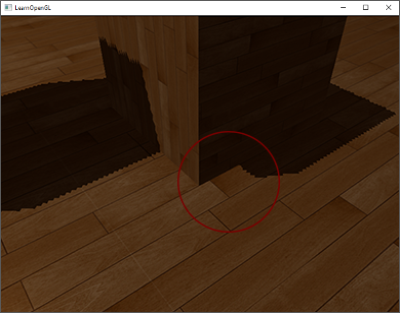
图9、peter-panning
这个现象只有在加入了 shadow bias的时候才会出现,如上图,会看到影子脱离了物体(像飞起来的小飞侠一样),被称为 peter-panning。
2、原因
上面现象中提到了 shadow bias,容易知道,其实就是shadow bias加的太多了。
shadow的计算是根据计算中使用的深度与shadow map的深度对比得到的,如果shadow bias加的太多,就会导致物体计算影子时的深度,与他的实际深度差别太大。所以影子就和物体产生了分离。
3、对策
解决的方法,当然就是不要使用太大的shadow bias。
六、Shadow Bias
前面两节一直在说要加入shadow bias,但是可以看到,加小了没用,会有 shadow acne;加多了又会导致 peter panning。所以要怎么加,是有一定技巧的,最终的目标是要找到一个刚好能够消除 shadow acne的 bias 值。
现在常用的shadow bias的计算方法,是基于物体斜度的,称为 slope scale based depth bias。
简单来说就是
公式的具象化可以参考下图:
图10、slope scale depth bias diagram
这样做的原理是,当斜度大的时候,shadow map上的一个点,所对应的实际物体的一小块面,其深度变化就会更大。
举例来说,一个x方向的斜坡,同样是在x方向上差0.01,如果坡角是45度,那么深度差就是0.01,如果坡角是60度,那么深度差就是0.017.
如果采样点都是在x=0.005处,那么对坡角60的情况,就需要bias至少为0.0085,才可以保证不会产生 shadow acne,而45度的情况,bias只要0.005就可以了
图11、slope scale depth bias示例
对于这个公式,需要做一些说明:
1)坡度如何确定?当然是用顶点的normal,但是需要注意的是,我们是在灯光坐标系下观察物体的,所以normal需要转换到light space中。
2)里面的两个参数factorSlope 和 constantBias 如何确定?NVidia 告诉我们:这是一门艺术.... 所以慢慢调吧。
shadow bias的代码,可以参考范例中 "02 ShadowMap With Bias" 部分。
七、问题三:Hard Shadow && Soft Shadow
1、现象
现在我们生成的阴影,其边缘是没有过渡的,这样也容易产生锯齿。(本节的图来自于 nvidia 的 gpu gems)

图12、hard shadow和边缘的锯齿
而现实世界中的影子(物理原理我忘记了,希望以后会填坑),边缘会更淡,有一定的渐变效果。
我们现在产生的这种无渐变的影子,就被称为 hard shadow,有边缘效应的则称为soft shadow。
2、原因
原因是显然的:我们的判断是0-1的,只是检查是否在阴影之中,只有是和不是两种情况,当然会产生 hard shadow。
3、对策
常用的解决方案称为 shadow filtering,在下一段,我们会展开来说。
八、Shadow Filter && PCF(Percentage Closer Filtering)
由于对PCF以外的 shadow filter了解甚少,因此我对于shadow filter的理解还不够清楚。其他可查的filter手段包括"Exponential shadow map filtering",“Variance Shadow Maps”(这个很常用,有机会要补完),都是用来解决shadow map的硬边缘和锯齿问题。
对于PCF,其核心思路就是,如果是影子内部,则他周围的一圈点肯定也在阴影之中,如果是影子边缘,则他周围就会有些点不在阴影里,且越靠边,这些不在阴影中的邻居越多。
所以检测一个点是否是在影子边缘,只要观察他的邻居就可以了。
在实际代码中,输入一个点A,我们在 shadow depth map中取出他和他周围点的深度,然后和 A 的深度做比较(相当于用 A 的深度来代表他周围那一圈点的深度),然后根据有多少个点在阴影中,确定点 A 处影子的强度。
原理是十分简单的,根据取点的方法和范围,又分为 2×2 PCF,4×4 PCF 等等;根据每个点对影子强度加成的系数不同,又分为平均采样,泊松采样等等。
代码可以参见范例中的 "03 ShadowMap With PCF"
九、问题四:近处锯齿 Perspective Aliasing
1、现象

图13、锯齿
如左图,在场景比较大的情况下容易出现这种情况,在view camera的近处,产生了锯齿状的影子。
2、原因
根本原因仍然是shadow map的分辨率不够(可以看出,这一点是shadow map方法的软肋)。
在camera的近处,场景中的物体的分辨率比较高,一小段面片,会对应着大量的pixel,而此时的shadow map精度没有发生变化,所以就会有大量的pixel对应着shadow map中的同一点,因而产生锯齿情况(当然使用 PCF 会略有好转)。
MSDN上的这张图很能说明问题:

图14、单张shadow map时的效果情况图
图中的方块中,颜色越深,表示shadow map的利用情况越差。可以看到,在camera近处,shadow map的利用率低,最终产生了锯齿。
另外一方面,对于较大的场景,如果使用一张shadow map来记录整个场景的depth,就容易不够用,也容易导致锯齿。
3、对策
解决的方案参见下一段:CSM
十、CSM (Cascaded Shadow Map)
针对上面的问题,容易想到,既然一张不够,那么我们就多来几张。这就是CSM的出发点。那么场景就变成了这样:

图15、多张shadow map时的效果情况图
同上面的图一样,图中的方块颜色越深,表示shadow map的利用情况越差。可以看到在使用多张shadow map的情况下,效果明显提高了。
CSM本身也是一个很大的话题,其中许多关键点也有多种实现方式,具体可以参考这里。我这里由于懒的原因,只实现了最基本的CSM。
下面来说明具体流程:
1、首先要将整个场景分割成多块
这里也主要有两种方法:
一种是 Fit To Scene,他的特点是所有区块的近平面都是相同的,变化的是远平面。见下图左。
另一种是 Fit To Cascade,他是普通的按照view camera的深度范围,将场景划分为若干块。见下图右。

图15、Fit To Scene && Fit To Cascade
显然 Fit To Cascade 对map 的利用率更高,但是Fit To Scene也有好处,主要是用来解决闪烁问题(这里我并没有理解透彻,期望以后可以补全)。
2、对每个区块,进行正常的shadow map截取
这一步和普通的shadow map并没有什么不同,只是要针对每个区块进行一次,从而会得到多个shadow depth map。每次截取,都需要记录截取时light camera的MVP矩阵。
3、在shader中,判断应该使用哪个shadow map
由于每个区块划分的依据是深度,因此简单的做法是将顶点的深度与划分区块的深度进行比较,就可以知道归属了。
另一种复杂的方法被称为 Map-based cascade selection。由于我本人理解有限,这里也不展开讲了。
4、选出shadow map之后,按照普通的shadow map方法进行深度比较和 filtering
这一步与普通的shadow map也是相同的。同样可以使用shadow bias和pcf。
5、在普通的CSM流程之后,还可以进行CSM区块之间的blending等操作来改善效果
这一步可以说是对基本CSM的改进了,我这里的代码没有实现。总体来说,就是针对两张 shadow map 交接处的不匹配现象,通过blending 来进行平滑过渡。
以上就是CSM的基本流程,具体的代码可以参考范例的 "4 CSM" 部分。
十一、范例
最后附上范例,地址:http://download.csdn.net/detail/ronintao/9569628。该范例使用 unity 5.3.4 编写,由于水平所限,仅仅实现了最基本的功能。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 理解Rust引用及其生命周期标识(上)
· 浏览器原生「磁吸」效果!Anchor Positioning 锚点定位神器解析
· 没有源码,如何修改代码逻辑?
· 全程不用写代码,我用AI程序员写了一个飞机大战
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· 记一次.NET内存居高不下排查解决与启示
· DeepSeek 开源周回顾「GitHub 热点速览」
· 白话解读 Dapr 1.15:你的「微服务管家」又秀新绝活了