ReentrantLock实现原理
以下是本篇文章的大纲
1 synchronized和lock
1.1 synchronized的局限性
synchronized是java内置的关键字,它提供了一种独占的加锁方式。synchronized的获取和释放锁由JVM实现,用户不需要显示的释放锁,非常方便。然而synchronized也有一定的局限性,例如:
- 当线程尝试获取锁的时候,如果获取不到锁会一直阻塞。
- 如果获取锁的线程进入休眠或者阻塞,除非当前线程异常,否则其他线程尝试获取锁必须一直等待。
JDK1.5之后发布,加入了Doug Lea实现的concurrent包。包内提供了Lock类,用来提供更多扩展的加锁功能。Lock弥补了synchronized的局限,提供了更加细粒度的加锁功能。
1.2 Lock简介
Lock api如下
void lock(); void lockInterruptibly() throws InterruptedException; boolean tryLock(); boolean tryLock(long time, TimeUnit unit) throws InterruptedException; void unlock(); Condition newCondition();
其中最常用的就是lock和unlock操作了。因为使用lock时,需要手动的释放锁,所以需要使用try..catch来包住业务代码,并且在finally中释放锁。典型使用如下
private Lock lock = new ReentrantLock(); public void test(){ lock.lock(); try{ doSomeThing(); }catch (Exception e){ // ignored }finally { lock.unlock(); } }
2 AQS
AbstractQueuedSynchronizer简称AQS,是一个用于构建锁和同步容器的框架。事实上concurrent包内许多类都是基于AQS构建,例如ReentrantLock,Semaphore,CountDownLatch,ReentrantReadWriteLock,FutureTask等。AQS解决了在实现同步容器时设计的大量细节问题。
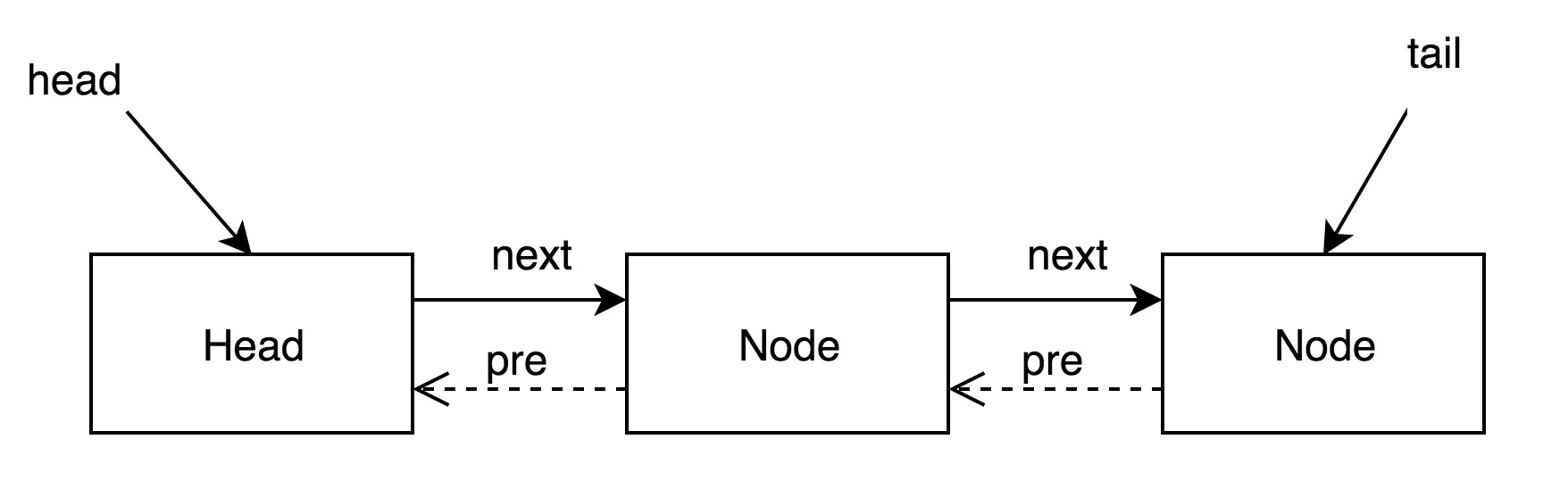
AQS使用一个FIFO的队列表示排队等待锁的线程,队列头节点称作“哨兵节点”或者“哑节点”,它不与任何线程关联。其他的节点与等待线程关联,每个节点维护一个等待状态waitStatus。如图
AQS中还有一个表示状态的字段state,例如ReentrantLocky用它表示线程重入锁的次数,Semaphore用它表示剩余的许可数量,FutureTask用它表示任务的状态。对state变量值的更新都采用CAS操作保证更新操作的原子性。
AbstractQueuedSynchronizer继承了AbstractOwnableSynchronizer,这个类只有一个变量:exclusiveOwnerThread,表示当前占用该锁的线程,并且提供了相应的get,set方法。
理解AQS可以帮助我们更好的理解JCU包中的同步容器。
3 lock()与unlock()实现原理
3.1 基础知识
ReentrantLock是Lock的默认实现之一。那么lock()和unlock()是怎么实现的呢?首先我们要弄清楚几个概念
- 可重入锁。可重入锁是指同一个线程可以多次获取同一把锁。ReentrantLock和synchronized都是可重入锁。
- 可中断锁。可中断锁是指线程尝试获取锁的过程中,是否可以响应中断。synchronized是不可中断锁,而ReentrantLock则提供了中断功能。
- 公平锁与非公平锁。公平锁是指多个线程同时尝试获取同一把锁时,获取锁的顺序按照线程达到的顺序,而非公平锁则允许线程“插队”。synchronized是非公平锁,而ReentrantLock的默认实现是非公平锁,但是也可以设置为公平锁。
- CAS操作(CompareAndSwap)。CAS操作简单的说就是比较并交换。CAS 操作包含三个操作数 —— 内存位置(V)、预期原值(A)和新值(B)。如果内存位置的值与预期原值相匹配,那么处理器会自动将该位置值更新为新值。否则,处理器不做任何操作。无论哪种情况,它都会在 CAS 指令之前返回该位置的值。CAS 有效地说明了“我认为位置 V 应该包含值 A;如果包含该值,则将 B 放到这个位置;否则,不要更改该位置,只告诉我这个位置现在的值即可。” Java并发包(java.util.concurrent)中大量使用了CAS操作,涉及到并发的地方都调用了sun.misc.Unsafe类方法进行CAS操作。
3.2 内部结构
ReentrantLock提供了两个构造器,分别是
public ReentrantLock() { sync = new NonfairSync(); } public ReentrantLock(boolean fair) { sync = fair ? new FairSync() : new NonfairSync(); }
默认构造器初始化为NonfairSync对象,即非公平锁,而带参数的构造器可以指定使用公平锁和非公平锁。由lock()和unlock的源码可以看到,它们只是分别调用了sync对象的lock()和release(1)方法。
Sync是ReentrantLock的内部类,它的结构如下

可以看到Sync扩展了AbstractQueuedSynchronizer。
3.3 NonfairSync
我们从源代码出发,分析非公平锁获取锁和释放锁的过程。
3.3.1 lock()
lock()源码如下
final void lock() { if (compareAndSetState(0, 1)) setExclusiveOwnerThread(Thread.currentThread()); else acquire(1); }
首先用一个CAS操作,判断state是否是0(表示当前锁未被占用),如果是0则把它置为1,并且设置当前线程为该锁的独占线程,表示获取锁成功。当多个线程同时尝试占用同一个锁时,CAS操作只能保证一个线程操作成功,剩下的只能乖乖的去排队啦。
“非公平”即体现在这里,如果占用锁的线程刚释放锁,state置为0,而排队等待锁的线程还未唤醒时,新来的线程就直接抢占了该锁,那么就“插队”了。
若当前有三个线程去竞争锁,假设线程A的CAS操作成功了,拿到了锁开开心心的返回了,那么线程B和C则设置state失败,走到了else里面。我们往下看acquire。
acquire(arg)
public final void acquire(int arg) { if (!tryAcquire(arg) && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) selfInterrupt(); }
代码非常简洁,但是背后的逻辑却非常复杂,可见Doug Lea大神的编程功力。
1. 第一步。尝试去获取锁。如果尝试获取锁成功,方法直接返回。
tryAcquire(arg)
final boolean nonfairTryAcquire(int acquires) { //获取当前线程 final Thread current = Thread.currentThread(); //获取state变量值 int c = getState(); if (c == 0) { //没有线程占用锁 if (compareAndSetState(0, acquires)) { //占用锁成功,设置独占线程为当前线程 setExclusiveOwnerThread(current); return true; } } else if (current == getExclusiveOwnerThread()) { //当前线程已经占用该锁 int nextc = c + acquires; if (nextc < 0) // overflow throw new Error("Maximum lock count exceeded"); // 更新state值为新的重入次数 setState(nextc); return true; } //获取锁失败 return false; }
非公平锁tryAcquire的流程是:检查state字段,若为0,表示锁未被占用,那么尝试占用,若不为0,检查当前锁是否被自己占用,若被自己占用,则更新state字段,表示重入锁的次数。如果以上两点都没有成功,则获取锁失败,返回false。
2. 第二步,入队。由于上文中提到线程A已经占用了锁,所以B和C执行tryAcquire失败,并且入等待队列。如果线程A拿着锁死死不放,那么B和C就会被挂起。
先看下入队的过程。
先看addWaiter(Node.EXCLUSIVE)
/** * 将新节点和当前线程关联并且入队列 * @param mode 独占/共享 * @return 新节点 */ private Node addWaiter(Node mode) { //初始化节点,设置关联线程和模式(独占 or 共享) Node node = new Node(Thread.currentThread(), mode); // 获取尾节点引用 Node pred = tail; // 尾节点不为空,说明队列已经初始化过 if (pred != null) { node.prev = pred; // 设置新节点为尾节点 if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } // 尾节点为空,说明队列还未初始化,需要初始化head节点并入队新节点 enq(node); return node; }
B、C线程同时尝试入队列,由于队列尚未初始化,tail==null,故至少会有一个线程会走到enq(node)。我们假设同时走到了enq(node)里。
/** * 初始化队列并且入队新节点 */ private Node enq(final Node node) { //开始自旋 for (;;) { Node t = tail; if (t == null) { // Must initialize // 如果tail为空,则新建一个head节点,并且tail指向head if (compareAndSetHead(new Node())) tail = head; } else { node.prev = t; // tail不为空,将新节点入队 if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
这里体现了经典的自旋+CAS组合来实现非阻塞的原子操作。由于compareAndSetHead的实现使用了unsafe类提供的CAS操作,所以只有一个线程会创建head节点成功。假设线程B成功,之后B、C开始第二轮循环,此时tail已经不为空,两个线程都走到else里面。假设B线程compareAndSetTail成功,那么B就可以返回了,C由于入队失败还需要第三轮循环。最终所有线程都可以成功入队。
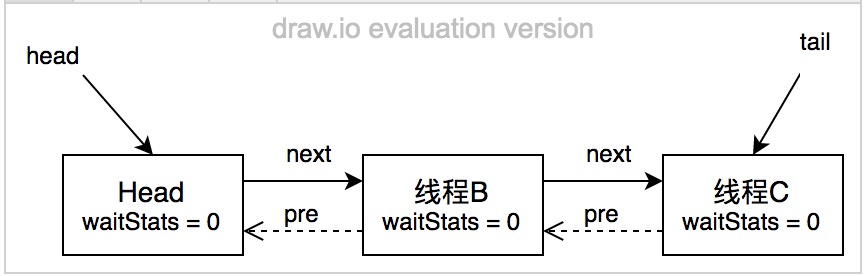
当B、C入等待队列后,此时AQS队列如下:
3. 第三步,挂起。B和C相继执行acquireQueued(final Node node, int arg)。这个方法让已经入队的线程尝试获取锁,若失败则会被挂起。
/** * 已经入队的线程尝试获取锁 */ final boolean acquireQueued(final Node node, int arg) { boolean failed = true; //标记是否成功获取锁 try { boolean interrupted = false; //标记线程是否被中断过 for (;;) { final Node p = node.predecessor(); //获取前驱节点 //如果前驱是head,即该结点已成老二,那么便有资格去尝试获取锁 if (p == head && tryAcquire(arg)) { setHead(node); // 获取成功,将当前节点设置为head节点 p.next = null; // 原head节点出队,在某个时间点被GC回收 failed = false; //获取成功 return interrupted; //返回是否被中断过 } // 判断获取失败后是否可以挂起,若可以则挂起 if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) // 线程若被中断,设置interrupted为true interrupted = true; } } finally { if (failed) cancelAcquire(node); } }
code里的注释已经很清晰的说明了acquireQueued的执行流程。假设B和C在竞争锁的过程中A一直持有锁,那么它们的tryAcquire操作都会失败,因此会走到第2个if语句中。我们再看下shouldParkAfterFailedAcquire和parkAndCheckInterrupt都做了哪些事吧。
/** * 判断当前线程获取锁失败之后是否需要挂起. */ private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) { //前驱节点的状态 int ws = pred.waitStatus; if (ws == Node.SIGNAL) // 前驱节点状态为signal,返回true return true; // 前驱节点状态为CANCELLED if (ws > 0) { // 从队尾向前寻找第一个状态不为CANCELLED的节点 do { node.prev = pred = pred.prev; } while (pred.waitStatus > 0); pred.next = node; } else { // 将前驱节点的状态设置为SIGNAL compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } return false; } /** * 挂起当前线程,返回线程中断状态并重置 */ private final boolean parkAndCheckInterrupt() { LockSupport.park(this); return Thread.interrupted(); }
线程入队后能够挂起的前提是,它的前驱节点的状态为SIGNAL,它的含义是“Hi,前面的兄弟,如果你获取锁并且出队后,记得把我唤醒!”。所以shouldParkAfterFailedAcquire会先判断当前节点的前驱是否状态符合要求,若符合则返回true,然后调用parkAndCheckInterrupt,将自己挂起。如果不符合,再看前驱节点是否>0(CANCELLED),若是那么向前遍历直到找到第一个符合要求的前驱,若不是则将前驱节点的状态设置为SIGNAL。
整个流程中,如果前驱结点的状态不是SIGNAL,那么自己就不能安心挂起,需要去找个安心的挂起点,同时可以再尝试下看有没有机会去尝试竞争锁。
最终队列可能会如下图所示
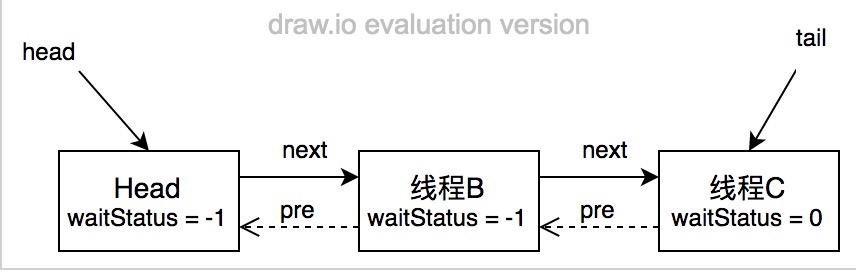
线程B和C都已经入队,并且都被挂起。当线程A释放锁的时候,就会去唤醒线程B去获取锁啦。
3.3.2 unlock()
unlock相对于lock就简单很多。源码如下
public void unlock() { sync.release(1); } public final boolean release(int arg) { if (tryRelease(arg)) { Node h = head; if (h != null && h.waitStatus != 0) unparkSuccessor(h); return true; } return false; }
如果理解了加锁的过程,那么解锁看起来就容易多了。流程大致为先尝试释放锁,若释放成功,那么查看头结点的状态是否为SIGNAL,如果是则唤醒头结点的下个节点关联的线程,如果释放失败那么返回false表示解锁失败。这里我们也发现了,每次都只唤起头结点的下一个节点关联的线程。
最后我们再看下tryRelease的执行过程
/** * 释放当前线程占用的锁 * @param releases * @return 是否释放成功 */ protected final boolean tryRelease(int releases) { // 计算释放后state值 int c = getState() - releases; // 如果不是当前线程占用锁,那么抛出异常 if (Thread.currentThread() != getExclusiveOwnerThread()) throw new IllegalMonitorStateException(); boolean free = false; if (c == 0) { // 锁被重入次数为0,表示释放成功 free = true; // 清空独占线程 setExclusiveOwnerThread(null); } // 更新state值 setState(c); return free; }
这里入参为1。tryRelease的过程为:当前释放锁的线程若不持有锁,则抛出异常。若持有锁,计算释放后的state值是否为0,若为0表示锁已经被成功释放,并且则清空独占线程,最后更新state值,返回free。
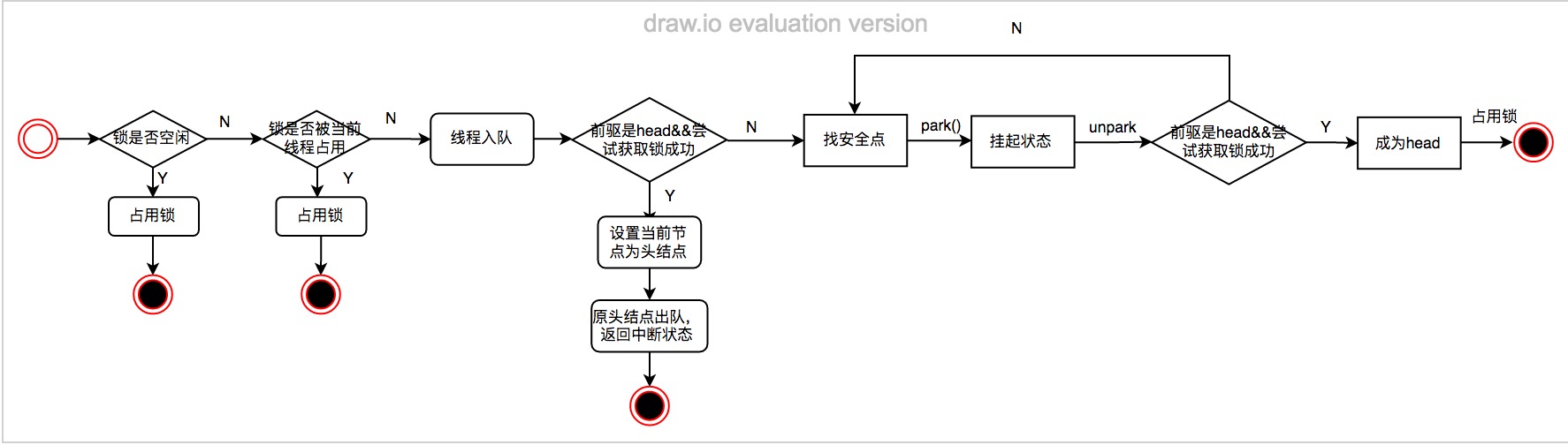
3.3.3 小结
用一张流程图总结一下非公平锁的获取锁的过程。
3.4 FairSync
公平锁和非公平锁不同之处在于,公平锁在获取锁的时候,不会先去检查state状态,而是直接执行aqcuire(1),这里不再赘述。
4 超时机制
在ReetrantLock的tryLock(long timeout, TimeUnit unit) 提供了超时获取锁的功能。它的语义是在指定的时间内如果获取到锁就返回true,获取不到则返回false。这种机制避免了线程无限期的等待锁释放。那么超时的功能是怎么实现的呢?我们还是用非公平锁为例来一探究竟。
public boolean tryLock(long timeout, TimeUnit unit) throws InterruptedException { return sync.tryAcquireNanos(1, unit.toNanos(timeout)); }
还是调用了内部类里面的方法。我们继续向前探究
public final boolean tryAcquireNanos(int arg, long nanosTimeout) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); return tryAcquire(arg) || doAcquireNanos(arg, nanosTimeout); }
这里的语义是:如果线程被中断了,那么直接抛出InterruptedException。如果未中断,先尝试获取锁,获取成功就直接返回,获取失败则进入doAcquireNanos。tryAcquire我们已经看过,这里重点看一下doAcquireNanos做了什么。
/** * 在有限的时间内去竞争锁 * @return 是否获取成功 */ private boolean doAcquireNanos(int arg, long nanosTimeout) throws InterruptedException { // 起始时间 long lastTime = System.nanoTime(); // 线程入队 final Node node = addWaiter(Node.EXCLUSIVE); boolean failed = true; try { // 又是自旋! for (;;) { // 获取前驱节点 final Node p = node.predecessor(); // 如果前驱是头节点并且占用锁成功,则将当前节点变成头结点 if (p == head && tryAcquire(arg)) { setHead(node); p.next = null; // help GC failed = false; return true; } // 如果已经超时,返回false if (nanosTimeout <= 0) return false; // 超时时间未到,且需要挂起 if (shouldParkAfterFailedAcquire(p, node) && nanosTimeout > spinForTimeoutThreshold) // 阻塞当前线程直到超时时间到期 LockSupport.parkNanos(this, nanosTimeout); long now = System.nanoTime(); // 更新nanosTimeout nanosTimeout -= now - lastTime; lastTime = now; if (Thread.interrupted()) //相应中断 throw new InterruptedException(); } } finally { if (failed) cancelAcquire(node); } }
doAcquireNanos的流程简述为:线程先入等待队列,然后开始自旋,尝试获取锁,获取成功就返回,失败则在队列里找一个安全点把自己挂起直到超时时间过期。这里为什么还需要循环呢?因为当前线程节点的前驱状态可能不是SIGNAL,那么在当前这一轮循环中线程不会被挂起,然后更新超时时间,开始新一轮的尝试
5 总结
ReentrantLock的核心功能讲解差不多落下帷幕,理解AQS,就很容易理解ReentrantLock的实现原理。文中惨杂着笔者的个人理解,如有不正之处,还望指正。
作者:mayday芋头

 浙公网安备 33010602011771号
浙公网安备 33010602011771号