
MATLAB分布式驱动电动汽车模型 分布式驱动电动车整车模型/四轮
MATLAB分布式驱动电动汽车模型
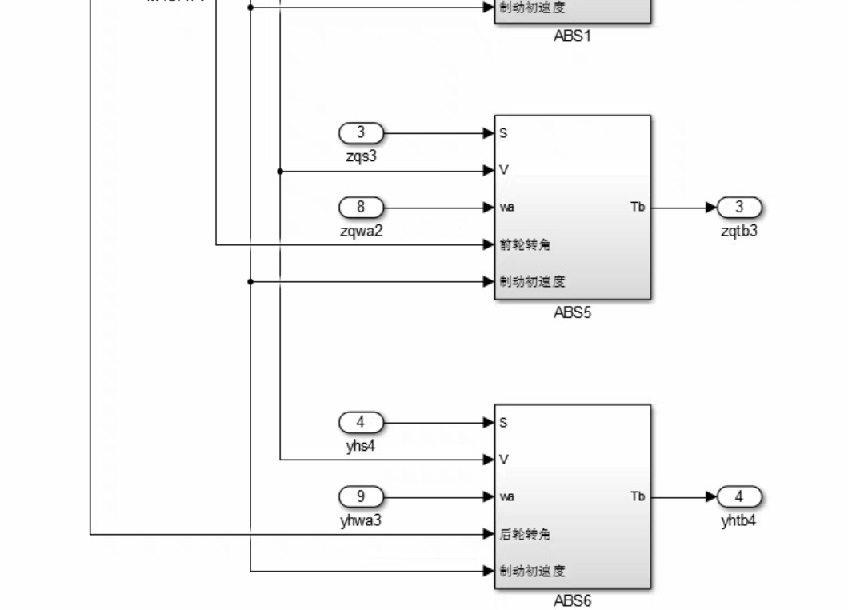
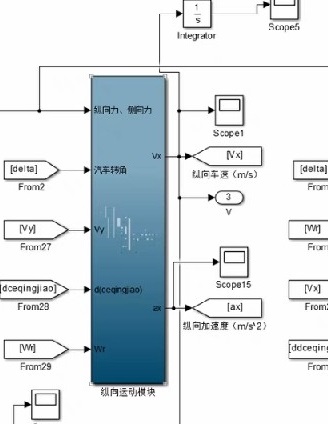
分布式驱动电动车整车模型/四轮驱动电动车整车模型/轮毂电机电动汽车整车模型/七自由度整车模型,包括纵向模型,侧向模型,横摆模型,以及四个轮胎四个自由度等等,设计高速转弯制动工况作为仿真工况,控制模型包括abs模型,采用模糊控制算法结合逻辑门限值算法。
控制算法:模糊控制算法,以车辆实际横摆角速度与期望横摆角速度的差值E及其变化率EC作为控制变量,基于模糊控制算法计算出补偿横摆力矩,以补偿横摆力矩F及其变化率FC作为控制变量,基于模糊控制算法计算出滑移率增量,然后将滑移率增量放到原来的直线abs控制策略中,对滑移率门限值进行修订,加一个补偿滑移率。
仿真出图:车速,纵向加速度,侧向加速度,四个轮胎分别滑移率,质心侧偏角,横摆角速度,整车横摆力矩,纵向力,侧向力,轮胎模型,汽车转角,轮速。
仿真验证:极限不稳定工况,蛇形工况,高速转弯制动工况。
电动汽车整车模型,稳定性验证
ID:2380687665672102


 浙公网安备 33010602011771号
浙公网安备 33010602011771号