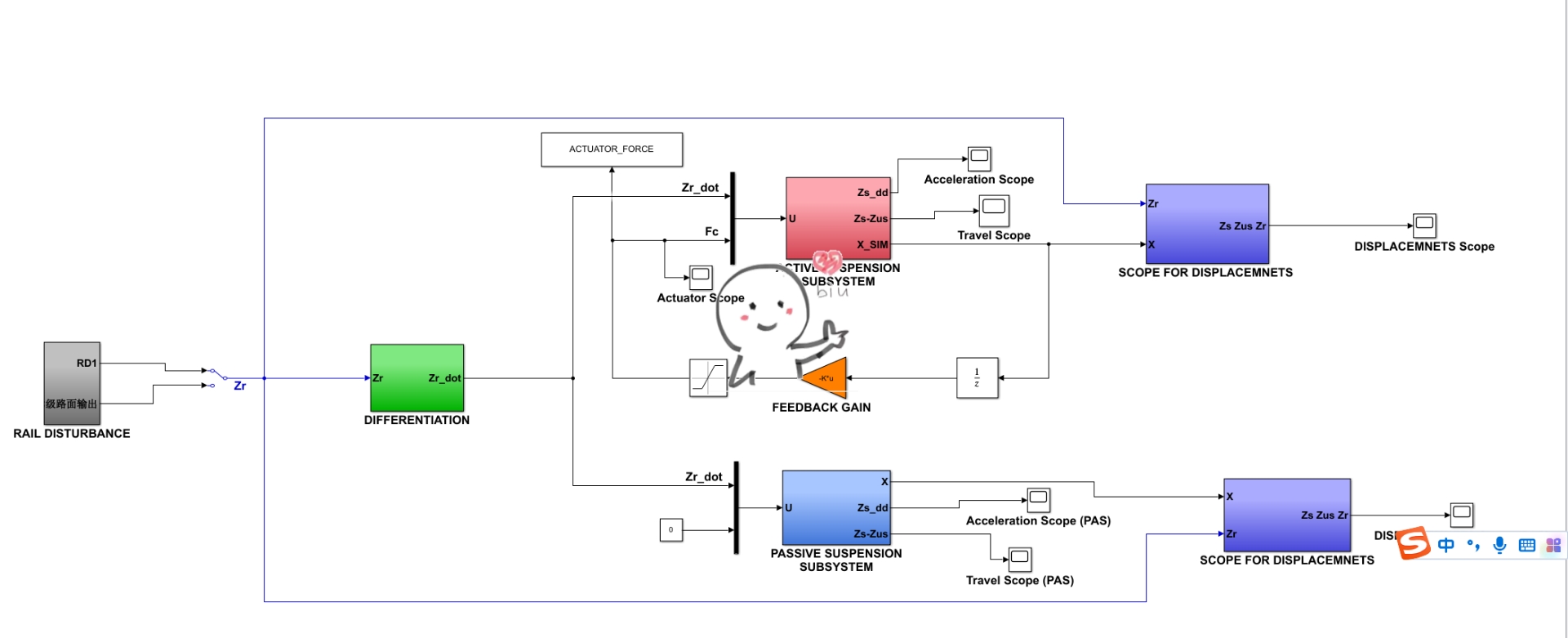
主动悬架仿真模型,控制算法采用LQR,对比对象为被动悬架,模型为四分之一模型。
扰动输入有两种,一种阶跃输入,一种c级路面输入,在simulink里面有选择器,自己选择哪种输入。
带有文字资料。
(直接运行m文件,里面可启动simulink并生成一系列图片)
ID:42200674694320182




 浙公网安备 33010602011771号
浙公网安备 33010602011771号