
10kW光伏并网逆变器控制系统设计概要
摘要
为建立xx20kW光伏并网逆变器控制系统框架,从17方面简单界定和介绍了设计目标及所采用的方法。设计结果对于了解光伏并网逆变器控制系统有一定帮助,同时从系统层面为进一步细化设计给出了指导。
关键词 光伏并网逆变器 控制系统框架 概要设计
1.概述
xx20kW光伏并网逆变器硬件总体设计方案已经确定,需要实现的控制功能可以做概要设计。已经知道10kW系统由Boost(DC/DC)和三相三线全桥逆变组成,如图1所示。基于此拓扑结构的光伏并网逆变器,可能应该具有图2中描述的14种功能,其中灰色背景的功能是必须的,其它功能是可选的。必须的功能包括:DC/DC控制、INV控制、MPPT、Anti-islanding、PLL、逆变输出直流量抑制、启动/关闭时序、故障保护、相序自动检测和频率自动识别;可选的功能包括:模式切换、风扇调速、均流控制和环流控制。文中将给出这些功能模块的概要设计。

图 1系统拓扑图
2. DC/DC控制系统设计

<img src="http://mooru.cn/cimgblog/0414.png">

前级DC/DC部分采用了Boost拓扑结构。当系统运行在整机模式(与旁路模式或者单级模式对应),主要功能包括两方面:,一是把较低的PV电压抬升使得满足逆变器正常工作;二是完成对PV(Photovoltaic Panel)的MPPT。在整机模式,即DC/DC和INV器同时工作的模式,周期相对较长的MPPT算法在执行完成一次算法后,会给出PV的参考电压。通过Boost闭环控制,使得PV电压无差追踪此PV参考电压。当PV参考电压等于最大功率点的电压时,PV工作在最大功率点。
对于Boost电路来讲,当输入电压恒定时,输出电压相对输入电压是被抬高了;而当输出恒定时,则输入电压相对输出电压被降低了。所以从Bus电压往PV电压方向看,Boost电路起的是降压的作用。在光伏并网逆变器中,Bus电压是由INV控制的,通过控制Bus来控制功率的流动。Bus电压对于Boost电路来讲是输出电压,是相对恒定的量,所以PV电压相对Bus电压是被降低了。并且此时,Boost闭环控制是控制PV电压去追踪MPPT电压(即MPPT算法给出的PV工作电压)。这点与常规的Boost控制有较大的差别,需特别注意。
Boost控制系统的设计可分成三步:建模、控制结构及控制器设计、仿真。
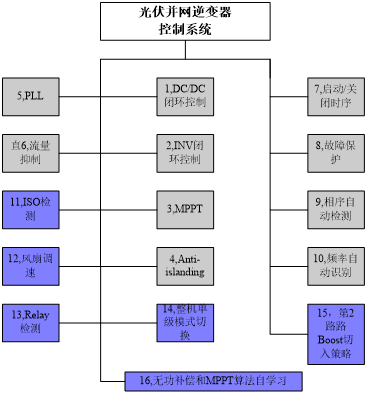
图 2光伏并网逆变器功能框图(蓝色背景为第3版增加)
2.1 DC/DC建模
参考图3所示的Boost电路图及符号定义,依据电感电压伏秒平衡原理(即电感电流在开关周期内等于常量)和电容电荷平衡原理(即电容电压在开关周期内等于常量),可建立平均状态方程如式(1)所示。通过Laplace变换,可得图4所示Boost模型框图。
其中:vpv为PV电压,iL为电感电流,Cpv为PV电容,L为Boost电感,ipv为PV电流,Vdc1= Vdc2为稳态时Bus电压,d为控制量Duty。
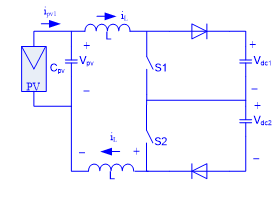
图 3 Boost电路图及符号定义
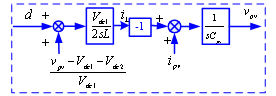
图 4 Boost模型框图
2.2 控制结构设计及控制器
根据图4所示的模型框图,可设计出DC/DC控制结构如图5所示。控制器采用PI控制,其参数可通过频率域中对称最优方法设计得到。
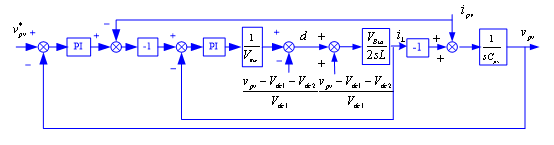
图 5 Boost控制系统结构
2.3 仿真
控制结构设计好后,需要通过仿真方法来验证或调整设计。一般仿真的流程包括:一,连续域数学模型仿真;二,连续域物理模型仿真;三,离散域物理模型仿真。其中第三步仿真是最关键的,当后期仿真成熟后,可跳过前两步,直接进行第三步。通过这些仿真,最后可得到方便移植的源代码。
这里提到的仿真不仅针对DC/DC控制部分,在控制系统设计的过程中都应该有仿真的过程,以降低直接上功率平台实验的风险。 本版本已经重新设计,并且仿真结果如附件。
如果DC/DC部分采用其他拓扑,如双Boost结构,需另行建模、设计控制结构、及仿真。
3. INV控制系统设计
上节中已经提到Bus电压是通过逆变控制系统来稳定的。通过控制Bus稳定可控制功率的流动方向,即Bus是从市电获取能量还是往市电输送能量。所以INV控制系统设计不仅包含逆变电流的控制,还包含Bus电压的控制。
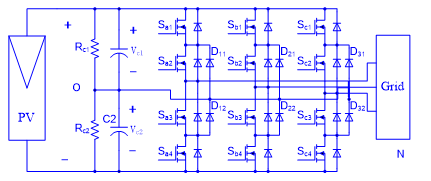
图 6 三相三线三电平逆变器拓扑及符号定义
3.1 INV建模
如同DC/DC部分,在设计控制结构之前,应先建立INV模型。主要包括逆变器模型和Bus模型。逆变器模型主要针对滤波电感建立的模型。通过建立Bus模型,从而建立起Bus电压与逆变器有功电流之间的关系。
,通过Clark和Park变换可得 ,
根据输入输出功率平衡关系,可得Bus电压模型为
C
3.2 控制结构设计
根据对象模型,可设计得到逆变控制框图如图7所示。从图中可以看出,Bus电压环是外环,电压控制器输出作为内环逆变电流环的参考电流。电流环采用了具有解耦的矢量控制策略,并且具有电网电压前馈,可增强电流环的动态响应能力。同时,使用了矢量调制策略。整个系统构成了矢量控制加矢量调制的控制结构。
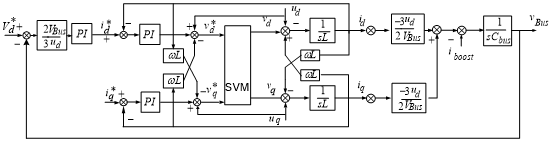
图 7 逆变器控制系统框图
4. MPPT算法设计
4.1 MPPT简介
为了最大的利用PV发出的电能,逆变器系统必须具备MPPT功能。一般常用的MPPT算法有,扰动观察法和电导增量法。电导增量法具有对采样准确性要求较高的缺点,实际产品中使用的算法还是以扰动观察法为主,或者在扰动观察法基础上进行一些优化设计。
4.2 扰动观察法简介
又称爬山法,就是在光伏阵列正常工作时,不断地给它的工作电压一个很小的扰动,在电压变化的同时,检测功率的变化,根据功率的变化方向,决定下一步电压改变的方向。控制原则是电压的变化始终是让PV阵列输出功率朝大的方向改变。扰动观察法的原理图如图8所示。
注意点:为了使得MPPT静态效率较高及动态响应较快,在具体设计实现过程中可增加一些改进措施,例如可增加变步长的策略。当系统运行点离最大功率点较远时,加快追逐步长;当系统运行点在最大功率点附近时,步长要相应减小。
另外希望在最大功率点(通过连续记录功率可判断出已经到最大功率点)时,停止MPPT ,之后若发现功率增加或减小的幅度超过设定值,则再次开始MPPT,如此保证静态MPPT效率较高。
优化设计:对MPPT算法更进一步的要求,就是如何在具有多个局部最优点的情况下,追踪到全局最优点,这还有待进一步研究,目前还没有较好的方法。
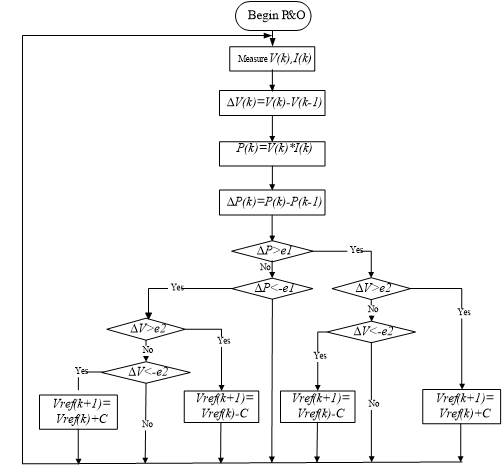
图 8 扰动观察法原理图
5. AI算法设计
5.1 AI简述
安全保护角度考虑,对于光伏并网逆变器,当市电断电后,应该具有及时关闭逆变器,避免继续给本地负载供电而形成孤岛的能力。IEEE Std. 929-2000标准[1]给出孤岛相关的定义,其中也包括了非孤岛逆变器(Non-islanding Inverter)的定义。定义分别从两方面给出界定:一是当有功失配度大于50%(此数字越大,匹配度越差)或者孤岛负载的PF小于0.95时,在市电断电后,逆变器的断开时间必须小于10个市电周期;二是当有功失配度小于50%(此值越大,匹配度越差),并且PF大于0.95和品质因子Qf小于等于2.5时,在市电断电后,逆变器应在2s内关闭。第一种情况是依据经验得到的结论,测试时仅针对第二种情况。.
标准中所定义的最难检测的负载类型是RLC并联负载如图9所示。并且要求:(1)L//C在额定工作频率处谐振,并且品质因子 (Quality Factor)等于2.5。在IEEE Std. 929-2000标准中给处了定义,即在给定频率处,L//C最大存储的能量与每个周期耗散的能量的比率的倍。

式中,即谐振角频率,也是市电额定频率。越大表示存储在负载中的能量相对更多,则负载更容易维持运行在谐振频率处,导致不易检测到孤岛;(2)光伏逆变器产生的功率应该匹配RLC负载。

图 9 AI测试电路
5.2 GEFS策略介绍
为了使得xx10kW光伏并网逆变器具有Anti-islanding功能,称为非孤岛逆变器。需要设计AI算法。常用的AI算法有幅值扰动、相位扰动、频率扰动三种方法。经过大致评估GE公司的频移法综合性能最优。这里将采用GEFS(GE Frequency Schemes)法。
GEFS不直接对频率进行扰动,而是间接地通过控制无功电流达到使频率偏移的目的,并且其不干扰电流波形,所以对THDi的负面影响明显减弱,GEFS算法的基本原理如图10所示。
GEFS所包含的频率正反馈原理如图11所示。断市电后,当检测到PCC(the Point of Common Coupling)处电压频率增加时,变大,即逆变器无功输出增加,根据负载特性,PCC处电压频率增加,如此反复,频率将持续地变大,最终触发过频保护,类似地,当初始检测到频率降低时,最终将触发低频保护。
5.3 GEFS策略改进
在具体设计过程中,BPF滤波器及增益的设计至关重要。
另外频率反馈信号可在锁相频率与过零中断频率之间选择。经过实验发现,选用过零中断频率效果更好。使用过零中断频率作为频率反馈信号的话,正反馈机制变为:市电断电后,系统噪声造成变大,导致逆变输出无功增大,则PCC处电压频率增大,假若此时锁相环还不能捕捉到频率的改变,但过零中断已经检测到PCC处电压频率增大,则进一步增大,PCC处电压频率进一步增大,此时的正反馈,仅仅是无功的正反馈,锁相环还没有参与进来,电流环闭环控制使用的锁相角还没有改变。当无功的变化量足够大而引起PCC处电压频率的改变能被锁相环捕捉到后,锁相环才参与进来。此时的正反馈为:变大,导致负载无功增大,PCC处电压频率增大,锁相环锁到此频率改变,电流环闭环控制使用的锁相角变成超前,导致逆变输出无功功率变大,同时,过零中断也会检测到PCC处电压频率增大,此时过零中断检测到频率可看作与锁相环锁到频率相同,则进一步变大,正反馈形成。
最终的AI算法可设计为
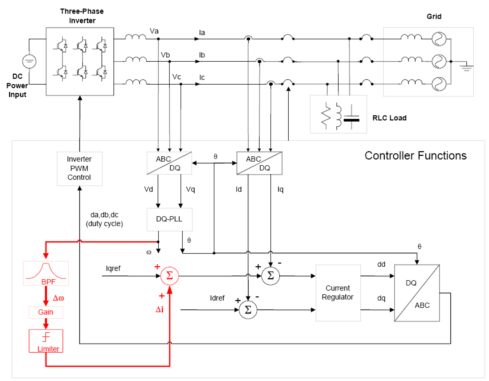
图 10 GEFS原理图
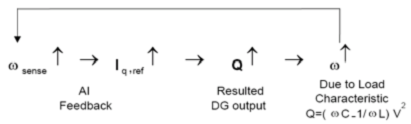
图 11 GEFS策略正反馈原理
6. PLL设计
6.1 PLL简介
PLL对于光伏并网逆变器具有重要意义。三相系统中矢量控制和孤岛检测中都需要PLL提供的相位和频率信息。
一般三相系统的锁相方法主要有两种:基于过零检测的锁相方法和基于坐标变换的锁相方法。基于过零检测的方法,容易受到噪声的影响,在市电有谐波时,检测误差较大,并且因其只能得到过零检测时刻的信息,而两个检测点之间的信息是无法获取。
基于坐标变换的方法可分为两类:开环和闭环。开环方法是通过abc-ab的坐标变换可直接得到sin和cos量。开环锁相通常需要与低通滤波器配合,低通滤波器的设计至关重要。另外,开环方法仅仅得到的sin和cos值,不能得到相位和频率信息,获取的信息相对较少,不能完全满足系统的需要。所以开环方法具有一定的局限性。
闭环方法的闭环环路中就具有低通滤波特性,可不用额外设计滤波器。另外,闭环锁相可直接得到市电相位角和频率信息,相对开环方法,具有一定的优越性。
6.2 基于坐标变换的PLL原理
这里将采用闭环锁相方法。三相系统的闭环锁相方法基本原理图如图12所示。图12中蕴含的过程可简单推导如下:设三相市电为
进行Clark变换可得
再进行Park变换可得
其中为锁相角。
把式和式代入式可得
从上式中可以看出,经过坐标变换后中含有了参考相位与锁相相位之间的差值。考虑到市电的不平衡以及电压偏移等问题的影响,在锁相环中增加了正序分量的提取环节,控制框图如图13所示。图中为低通滤波器,使得锁相闭环具有抵抗市电高次谐波的能力。正序分量的提取方法可根据下式进行
其中。
图 12 基于坐标变换的三相闭环锁相 图 13 基于坐标变换的正序分量提取的三相闭环锁相
6.3 仿真
为了进一步验证前面理论分析,可通过MATLAB做仿真。这里可先进行连续域仿真,再进行离散域仿真。
7. 直流量抑制策略设计
7.1 直流量简介
对于光伏逆变并网系统,当输入电网电流中含有不期望的DC电流时,即发生了DCI(DC Injection)。IEEE std 1547标准和IEEE std 929-2000标准都给出了DCI限值为额定输出电流的0.5%,其依据是:(1)对于变压器来讲,当直流量未达到其额定电流的0.5%时,不用考虑变压器的磁芯饱和问题;(2)每台并网逆变器应允许其向电网输送一定的直流量, 前提条件是所有光伏逆变器的总功率等于区域发电系统中的变压器额定容量。
IEEE std 929-2000标准给出了两种解决方法:(1)在电网和逆变器之间加入隔离变压器能解决这样的问题;(2)对直流量采样,如果超限值,则关机。当前xx10K PVI系统是无隔离变压器系统,所以第一种方法是不可行的,需要设计DCI抑制策略。
7.2 直流量产生的原因
因为电流环是无差闭环系统,当参考电流不含直流量时,输出不应该存在直流量。但由于电流传感器存在零漂、反馈调理电路模拟器件零漂,以及逆变器开关管器件不完全一致性、驱动信号不一致、电网电压不完全对称等因素,并网电流中存在直流分量。从控制理论角度来看,若把这些引起直流量的因素统一称为扰动d的话,则此扰动量只能作用的反馈通道上。因为若d作用在前向通道,闭环控制系统会抵抗此d的作用,使得输出无直流量。如此,被扰动后的控制系统可用图14来描述,图中,i*abc表示三相参考电流,i*abc+i*abcd 表示输出电流的直流分量加交流分量,dabc表示引起直流量的扰动量。
图 14 直流量产生的原理框图
7.3 直流量抑制策略设计
图14中引起直流量的扰动量无法检测到,所以不能直接做补偿来抵消扰动量。那么用来抵消扰动量的补偿量如何选取呢,需引入负反馈机制,形成图15所示的抑制直流量策略。从图中可以看出,直流抑制策略采用积分控制器,控制器输出及控制量是用来抵消扰动量d,达到减小直流量的目标。
图 15 直流量抑制控制框图
7.4 实施
从控制理论角度解释了直流量产生的原因,并依此设计了控制结构。在实施时,需要增加直流量检测电路。检测电路基本上分为两种:利用两级RC电路进行滤波;利用差分放大电路滤除50Hz电流,并放大直流量。经过处理的信号经过AD采样进入DSP可以用作闭环控制。直流量检测也可通过软件算法来实现,但是精度较差。根据经验,推荐用差分放大电路处理信号。
另外,直流量的频率非常低,约0.5Hz,需要确定合适的控制频率。
截止频率选择依据:(1)必要条件:小于逆变电流闭环截止频率的10倍;(2)若扰动信号仅包含直流量,则截止频率只要小于100Hz都是可以的;(3)若扰动信号中除了直流量外,还包含低频交流量,则截止频率不仅要小于100Hz,还要满足截止频率大约等于低频交流量频率的8~10倍;(4)截止频率越大,控制速度越快,反之,越慢。
控制周期的选择:(1)最小控制周期:依据直流量的采样处理方法,若每个市电周期求取一次直流量,则最小的控制周期即为20ms;(2)若每4个市电周期求取一次直流量,此时直流量更光滑,有利于稳定;(3)控制周期越长,则每次增加的积分量越大,反之,越小;(4)若每次增加的积分量固定后,则控制周期越长,相当于截止频率越低,反之,越高。
实测直流量信号为频率0.2Hz左右的低频交流量。根据截止频率选择的原则,这里可选10Hz的截止频率。控制周期可选为0.8s~1s,即4个周期或者5个周期控制一次。参数最终确定可在实际调试过程中完成。
8. 启动/关闭时序设计
启动/关闭时序关系着系统的运行过程。此时序定义了系统从启动到正常运行,再到关闭的过程。这里假设启动条件,关闭条件已经在Spec中设定。另外根据SPS的接法不同(SPS从PV取电,还是从Bus取电),相应启动时序也不相同。这里假设SPSS接PV。
8.1 启动时序
SPS接PV,则启动过程为:
Step1, SPS上电后,在开机前,会先做DSP初始化与Eeprom读取的动作,随后软件系统建立起八个任务(Task),最后才启动整机系统。
Step2, 系统启动后,在Super Task任务中经过条件判断,依次经过PowerOn Mode、Idle Mode, PreCheck Mode、Normal Mode(分成两种:可旁路CanSinglePVMode;不可旁路NoSinglePVMode) 四个工作模式,达到正常运行状态。此四个工作模式的需说明如下:
PowerOn Mode:SPS上电,且操作系统接管整个软件系统后,延迟500ms后进入Wait Mode,
Idle Mode:由PowerOn Mode进入,倒数20sec。由其他Mode进入,倒数60sec。倒数完毕,检测是否达到开机条件(PV电压达到启动电压、绝缘阻抗检测完成、电网相序和频率侦测完成),达到后,延迟一段时间进入sPreChkMode;
PreCheck Mode:开始BUS软启,之后检测GFCI设备、检测Relay、开始打逆变PWM、等待PV连接方式判断结束;根据PV连接方式检测结果确定使能哪路Boost控制,若可以转旁路则进入sCanSinglePVMode,否则进入sNoSinglePVMode;
CanSinglePVMode:稳定工作模式,该模式下可以转旁路,此模式下处理整机与旁路之间的切换,两路DUTY相差;
NoSinglePVMode:稳定工作模式,该模式下不能转旁路,此模式下处理整机中前级的Boost控制;
8.2 关闭时序
Fault Mode: 在Normal Mode下,若发生故障,则进入Fault Mode,待Fault清除后,进入Idle Mode,再依次执行开始时序;若PV电压小于关机电压,进入Shutdown Mode,关闭SPS。
Shutdown Mode:进入此模式后,则关闭SPS,整个系统处于无电状态。
9. 故障保护策略设计
为了保障系统的安全稳定运行,需要设计合理的故障保护策略,使得系统不仅能检测到故障,而且在故障出现后能做出相应的动作,尽快脱离故障环境。按照故障的严重程度分为三级:Warning(警告),Fault(可清除之故障),Permanent Fault(永久性故障),如表1所示。每级中包含的项目及每项的功能及实现方法见表2,表中Permanent Fault简称PF。
表 1 故障分类表
|
轻 |
重 |
严重 |
|
置Warning Code,提醒用户注意 |
置Fault Code,并转转Fault Mode;等待故障解除后,系统将重新开机 |
置Permanent Fault Code,并转Shutdown Mode,需要重新上电才可开机 |
|
4中Warning Code
|
17种Fault Code |
5种Permanent Code |
表 2 故障名称及功能列表
|
编号 |
故障名称 |
主要功能 |
实现方法简介 |
|
W1 |
Fan1故障 |
监控Fan1是否故障 |
通过定期检查Fan1转速来实现。 |
|
W2 |
Fan2故障 |
同上 |
同上。 |
|
W3 |
Spi(or SCI)通讯故障 |
检测INV和LCD是否正常 |
每个SPI通讯周期(0.5ms)检测一次,如果连续50次检测到SPI通讯故障,则报Warning ,3分钟以后对中MCU进行复位重启,发生故障后会不断重启MCU,直到故障清除。 |
|
W4->Fault |
Eeprom故障 |
检测Eeprom中数据是否正常 |
DSP上电初始化结束后,读取DSP中EEProm数据。 |
|
Fault1 |
Bus电压过低故障 |
检测Bus电压 |
每10ms检测一次,连续5次检测到,则报故障。 |
|
Fault 2 |
Bus电压过高故障 |
同上 |
同上。 |
|
Fault 3 |
Bus软启动超时故障 |
检测Bus软启过程是否有异常 |
开机后需要进行BUS软启时执行,若连续15s检测到BUS电压不能软启到390V,则软启超时Fault。 |
|
Fault 4 |
逆变软启动超时故障 |
检测INV软启过程是否有异常 |
开机后需要进行逆变软启时执行,若连续15s检测到BUS电压不能软启到420V就报软启超时Fault。 |
|
Fault 5 |
PV电压过高故障 |
检测PV电压是否超高限(任何一路高则故障) |
每10ms检测一次,连续1s发现PV电压高于Eeprom设定的上限,则Fault。 |
|
Fault 6 |
Boost电感过流故障 |
检测电感电流是否超过其上限 |
每开关周期检测一次,若连续5次检测到,则即刻封闭PWM,转入Fault Mode。 |
|
Fault 7 |
电网电压故障 |
检测电网电压是否异常
|
1, 每个开关周期检查一次,连续75次检测到某相电压超过240V,则Fault; 2, 每20ms计算相电压有效值,并取4个2分钟的平均值后再做移动平均,若结果大于220*15%,则Fault。 |
|
Fault 8 |
逆变过流故障 |
保护逆变器及电感。检测是否有异常 |
每个开关周期检查一次,若 1, 电流瞬时值大于电流阀值连续5次,或者 2, 电流瞬时值加上其变化值大于电流阀值连续5次,则Fault。 |
|
Fault 9 |
电网频率故障 |
检测频率是否异常,超出正常范围 |
每20ms一次,若连续4次发现超高限,或连续4次超低限,则Fault。 |
|
Fault10 |
反孤岛检测故障 |
防止孤岛发生 |
具体见AI部分。 |
|
Fault11 |
电网No Utility故障 |
检测电网是否掉电 |
1、连续三个周期过零信号消失,会强制将三相电压与线电压清除为零,报cNoUtility Fault; 2、检测市电线电压高于380Vac*115%(437V)或低于380Vac*85%(323V)则表示输出欠相,报cNoUtility Fault; 3、检测市电相电压有无超过220Vac*115%,或低于220Vac*85%,若连续6次超出范围报cNoUtility Fault; 4、检测市电相电压有无低于Eeprom中存储的电压最低值; 5、检测市电相电压有无高于Eeprom中存储的电压最高值; 6、在4、5正常的基础上,检测市电线电压低于Eeprom存储的最低值减60V或者高于Eeprom存储的最低值加20V; 7、检测是否R、S、T三相电压有1相为零 若上1~7有任何一种情况发生则报Faults。 单相掉电不做处理。 |
|
Fault12 |
Relay检测故障 |
为了安全,以防Relay故障而不能及时断开电网。仅适用于电网侧有两个Relay的情况 |
仅在开机前,做开机检测时执行一次。 1. 计算RST三相的瞬时值和平均值的平方差作为判断Relay是否发生故障的条件。如果连续500ms,差值都小于100V的平方,而三相电压值都大于300V,则认为Relay无故障,可以合入逆变Relay。否则,如果连续500ms不能满足上述条件,则进入cRelayFault 故障; 2. 过500ms后计算RST三相的线电压与Relay后的电压的差值的绝对值,如果小于40V,则认为Relay没有问题,Relay检测完毕,可以输出,如果连续500ms大于40V,则认为Relay有问题,进入Fault Mode。 |
|
Fault13 |
温度过高故障 |
|
每500ms检测一次,若连续2.5sec检测到温度高于85度,则进入Fault Mode并显示cOverTempFault。 若散热片温度低于85度且没有cOverTempFault Code存在,每60sec会计算一个参考输出功率值( Derating Power)。 |
|
Fault14 |
PV连接方式检测故障 |
通过连接方式检测间接判断DC/DC部分是否有异常 |
若Boost Duty经干扰2s后,PV电压几乎没有变化,则进入Fault Mode。 |
|
Fault15 |
HCT传感器故障 |
通过电流采样,及直流量采样来判断HCT是否故障 |
每20ms检测一次, 1,系统上电后,检测三相输出电流采样的校正值是否在±150mV范围外。若连续十次检测超过范围,转Fault Mode; 2,系统并联市电前,检测输出电流的直流偏移量有否超过1A,若连续10次超过范围表示硬件线路本身偏移量过大,转FaultMode; 3,系统并联市电且稳定后,检测三相输出电流均方根值是否小于参考Id的一半。若连续10次不成立则表示HCT异常,转FaultMode。 |
|
Fault16 |
DCI超限故障 |
防止直流量过大 |
并网发电时,每20ms检测一次, 任一相电流DCI连续8个市电周期超限,则报cDCIOutRange。 |
|
Fault17 |
ISO绝缘阻抗故障 |
PV绝缘阻抗小于最小阻抗值时,提示用户增加绝缘阻抗 |
开机执行绝缘检测,若有故障则20ms检测一次,否则不再检测。计算各支路绝缘阻抗值,若满足故障条件三次则进入Fault Mode。 |
|
Fault18 |
GFCI故障 |
漏电流超限保护 |
20ms计算一次平均值,取最新的4个值再计算平均值,若超限则Fault. |
|
PF1 |
Bus过低永久性故障 |
Null |
连续三次发生Fault1,则进入PF mode,直接关机。 |
|
PF2 |
Bus过高永久性故障 |
Null |
连续三次发生Fault2,则进入PF mode,直接关机。 |
|
PF3 |
Relay永久性故障 |
Null |
连续三次发生Fault12,则进入PF mode,直接关机。 |
|
PF4 |
HCT永久性故障 |
Null |
连续三次发生Fault15,则进入PF mode,直接关机。 |
|
PF5 |
DCI永久性故障 |
Null |
连续三次发生Fault16,则进入PF mode,直接关机。 |
故障分类方法按照下表进行。数据来自xxTechnical Requirement
10. 相序自动检测
为了方便用户接线,相序检测相对简单,在R相过零中断时,通过比较S相和T相电压之间的关系可知道三个相序之间的关系。若图16可以看出,在R相过零时,若VS > VT,则认为相序正确;若VT > VS,则调换采样值,其他不变。
图 16 RST三相相序关系图
11. 频率自动检测及60Hz逆变控制参数设计
为了使得逆变器具有自动适应50Hz和60Hz电网在功能,需要在逆变器启动前,检测电网的频率和相序。若检测到电网的频率是60Hz,则在控制逆变器及PLL部分需要调用相对应60Hz的控制器参数。
所以为了实现频率的自动适应,除了设计50Hz系统的控制参数外,还需设计60Hz系统的控制参数,并在启动逆变器前,检测电网频率,之后再对应选择控制器参数。60Hz系统参数设计与50Hz参数设计类似。在具体设计时,给出设计过程及结果。
12. 绝缘阻抗检测算法设计
12.1 方法1
采用电桥法,绝缘阻抗检测方法1电路如图 17所示。,为检测电阻,和为被检测电阻。检测方法为:当Relay1闭合,Relay2断开时,采样;当Relay2闭合,Relay1断开时,采样。根据基本电路定律,可列写方程组
其中,。定义,,把式写出
定义,,,,,把式写成
容易求得方程组的解为
图 17 绝缘阻抗检测原理图1
12.2 方法2
检测电路如图 18所示。检测方法原理与方法2相同,但是采样值少一个。当Relay1闭合时,采样电压;当Relay1断开时,采样电压。对两种工作状态列写方程为
其中,。定义,,,,,,,可把式写成式。同理可得到解,和的倒数就绝缘阻抗值。把此值与设计的检测标准相比,判断是否绝缘阻抗异常。
图 18 绝缘阻抗检测原理图2
两种方法相比较:(1)第2种方法少了一Relay,少了一个AD采样,具有优势;(2)第2种方法负桥臂检测电阻始终与地连接,需选择较大阻值。
13. 风扇调速算法及过温降额处理策略
20kw共有三个风扇,使用同一个调速电压。根据功率及温度进行开环调速,调速电压等于
式中为实测温度,为实测电流(代替功率),,,三个常量可通过实验计算得到。
默认值分别为45摄氏度,6,8。图 19给出了调速函数曲线图。可见是线性函数。
根据《20kw电路总体方案设计》,温度超过75摄氏度需降额处理,温度超过85度则过温保护。这里既有根据温度调速,又有过温降额处理,需要设计策略使得系统稳定平滑运行。
图 19 风扇调速函数曲线
14. Relay检测算法设计
为了符合VDE标准,逆变滤波器后有两组Relay(如上图所示),分别称为逆变Relay(Inv Relay)和电网Relay(Grid Relay)。在系统进入PV Mode(即正常发电模式)前,需要检测两组Relay是否可以正常开关动作。定义逆变Relay滤波器侧的电压为Vinv,电网Relay的电网侧电压为VGrid。可通过两组电压值及两个Relay的不同开关组合状态, 判断出两组Relay是否正常工作。
检测方法安装下表进行。
|
步骤 |
Inv Relay状态 |
Grid Relay状态 |
判断条件 |
判断结论 |
|
1 |
0 |
0 |
(Vinv < =10V)&( VGrid >= Vmin) |
2组Relay可正常断开 |
|
否则 |
2组Relay都不能正常断开 |
|||
|
2 |
1 |
0 |
(Vinv < =10V)&( VGrid >= Vmin) |
Grid Relay可正常断开 |
|
否则 |
Grid Relay不能正常断开 |
|||
|
3 |
0 |
1 |
(Vinv < =10V)&( VGrid >= Vmin) |
Inv Relay可正常断开 |
|
否则 |
Inv Relay不能正常断开 |
|||
|
4 |
1 |
1 |
(Vinv –VGrid ) <= 10V) |
2组Relay可正常闭合 |
|
否则 |
2组Relay可正常闭合 |
|||
|
备注: |
(1)断开0,闭合1;(2)只要其中1步发生故障(尝试3次),则肯定有故障;但其中某1步正常,不代表是正常,一定要经过4个步骤后若都正常,才能判定为正常;(3)若在某步检测到异常,则再追加检测2次,若3次检测都是故障,则光伏逆变器系统进入Permanent Fault模式。 |
|||
15. 整机和单级工作模式相互切换策略
整机模式是指Boost和逆变同时工作的系统状态,单级模式是指Boost电路被旁路,仅逆变并网工作的系统状态。
根据电路原理,为保证光伏逆变器能正常工作,需满足两条件:(1)Bus电压必须高于市电线电压峰值;(2)在整机模式,为了保证boost部分能正常工作,需要满足PV电压低于Bus电压。为了满足条件1,在整机模式下Bus电压的参考值需要根据市电电压进行调整。在模式切换时需考虑条件2。
电压参考值的计算方法:在整机模式下,令Bus电压参考=线电压有效值*1.414+55V。在单级模式下,令Bus电压参考=执行Mppt所算的电压。当PV电压>线电压有效值*1.414+50V时,让系统转单级模式;当PV电压<线电压有效值*1.414+35V时,让系统转整机模式。这样的阀值设定是综合考虑了PVI正常工作的需要,及电压量的采样误差。
另外为了保证Mppt及系统的稳定运行,在整机模式下,对Bus波动做限制,每秒最大波动3V。在时序上,由于整机模式下,需要根据线电压来计算Bus参考值,所以在将整机模式下的Bus计算放在市电过零事件中执行。
模式切换应在main函数的时序中执行。
开机时工作模式的确定。在每次从PreCheck Mode开始启动逆变器时,需选择按整机模式开机还是按照单级模式开机。选择条件为,当PV电压小于640V,按照整机模式启动,进入PV Mode; 当PV电压大于等于640V时,按单级模式开机。
16. 第2路Boost切入切出策略
在功率小于55%时,仅使Mosfet模块组成的 Boost工作,可获得轻载高效率,当功率大于55%时,第2路(IGBT模块)Boost需由不工作状态平滑切入到工作状态。根据对串联型Boost的并联工作的仿真结果可知,两路Boost并联时,每路Boost单独进行控制,即可控制两路Boost的功率不同。
为了叙述方便,假设电压环的输出(即电流环的参考值)为,第1路Boost参考电流值为,第2路Boost参考电流值为,需满足。
当第2路从不工作状态切入到工作状态时,希望电感电流是缓慢平滑增大的过程。为了达成期望,这里的策略是:两个Boost使用同1个电压环,2个电流环。控制第2路Boost参考电流的增加速度为1A/2s,当第2路Boost参考电流增加的同时,为了保持,第1路Boost的参考电流必须以相同的速度减小。当第1路参考电流减小到或者第2路参考电流增加到接近(在其左右0.5A,可认为是接近)时,让。
当功率慢慢减小到45%(为了避免振荡,设计的回差为10%的额定功率),可执行与切入相反的动作,使得第2路Boost缓慢切出。
17. 无功补偿及MPPT算法自学习设计
这部分功能还未有成熟的思路。这里仅仅是感性的认识。
(1)无功补偿能力。要实现无功补偿,对于当前的逆变器控制策略来讲,没有难度,可通过给定电流环Q通道参考电流就可实现。即我们知道怎么补偿无功,但是补偿多少,我们并不知道。这里涉及到电网调度中心与光伏电站之间的通讯,调度中心应该发出补偿无功的指令,指令应包含时间及补偿量的等信息。
如果光伏电站是通过光伏逆变器器监控系统与电网通讯,则电网可把相关补偿无功的信息发给监控系统,监控系统可通过逆变器的LCD单元的MCU把指令传递到DSP,并执行补偿无功的动作。
所以,这里涉及到电网调度的相关知识和电网与电站之间的通讯方式及通过规约等。就目前来看,我司还没有这方面的人力跟踪此项功能。
(2)关于MPPT算法自学习。电站监控系统是可以检测到外界温度及光照情况信息的。如果知道PV panel的额度配置情况,可根据其外界温度及光照,理论上可计算到其最大功率点。如果已经知道了最大功率点,对于DSP完成MPPT功能是有利的。但是具体如何学习,还未有成熟想法。有待以后作为技术改良课题研究。
12. 总结
控制系统是光伏并网逆变器中核心,主要包含了约10种功能。对每个功能块做了简单粗略的设计。此结果对于认识和了解光伏逆变器控制系统有重要的作用,为进一步详细设计提供了框架,奠定了基础。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号