伺服-电子齿轮的设定
“电子齿数”是对来自上位装置输入指令的1个脉冲对应于工件所走的移动量进行任意设定的功能。
设编码器为17位编码器,则其分辨率为131072,那么伺服旋转一周编码器反馈回来131072个脉冲。假设电机轴直接连在丝杠上,且丝杠的螺距为5mm。现要求上位装置每输出一个指令脉冲,工位就移动0.001mm,即1脉冲对应0.001mm的位移。则如果上位装置要求伺服转一周就需要输出指令脉冲个数为:
5mm/0.001mm=5000
也就是说,当上位装置向伺服输入5000个指令脉冲时,需要伺服转一圈,同时编码器反馈回来131072个脉冲。那么这个时候就需要电子齿轮功能了,其实可以简单地这样理解:上位装置发1个脉冲到驱动器中,然后通过电子齿轮把它乘以一个系数(电子齿数比),使其达到目标要求。
电子齿数比=131072:5000
如果电机轴与丝杠间还有减速比的话,就是(131072/5000) * (m/n)
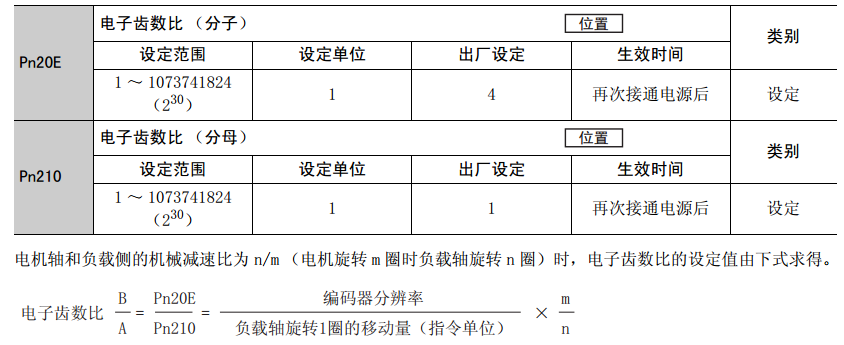
其中,m和n的意义是:当电机旋转m圈时负载轴旋转n圈。
以安川Σ-V系列伺服为例,位置控制模式下,其电子齿数比通过Pn20E(分子)和Pn210(分母)来设定。
假设传动比为2:1,那么此时,Pn20E=131072*2,Pn210=5000*1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号