Lidar
基本参数
RS-Lidar-16(以16线为例)
视角(水平)360度,角分辨率0.1度(5Hz)~0.4度(20Hz)
视角(垂直)-15~15度,角分辨率(垂直) 2度
测距150米
测量精度+/- 2cm
点数~300,000/秒
转速:5/10/20Hz
波长:905nm
功耗:12w
16通道顺序完成一轮扫描的时间为55.5us
RS-Lidar-32
视角(水平) 度,角分辨率 0.1度(5Hz)~ 0.4度(20Hz)
视角(垂直)-25~15度,角分辨率(垂直) 最小0.33度
测距200米
测量精度+/- 3cm
点数~600,000/秒
转速:5/10/20Hz
波长:905nm
功耗:13.5w
32通道顺序完成一轮扫描的时间为55.5us
坐标系(最终获得的点为依据雷达的旋转角,测距以及垂直角度计算的XYZ坐标值):
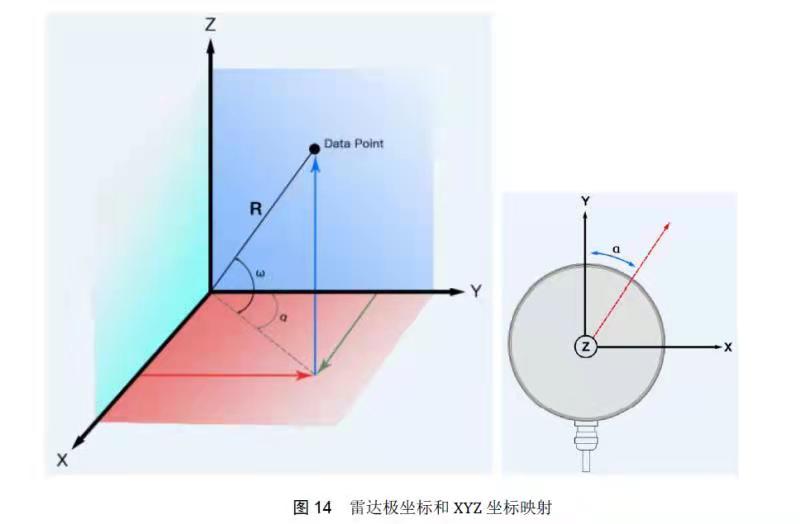
UDP包中包含:距离、旋转角、校准的反射率,同步的时间标签(1us)
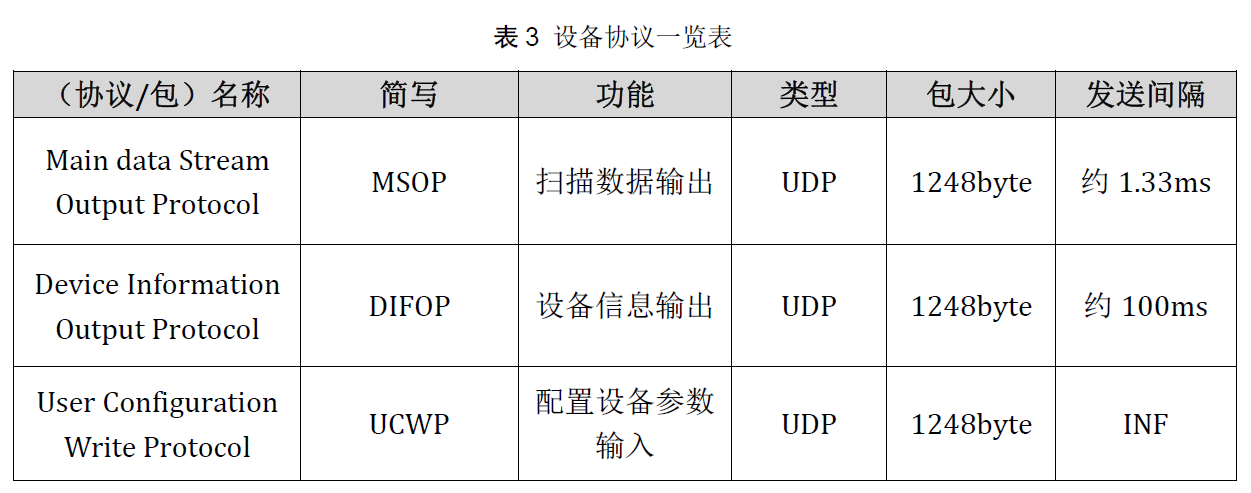
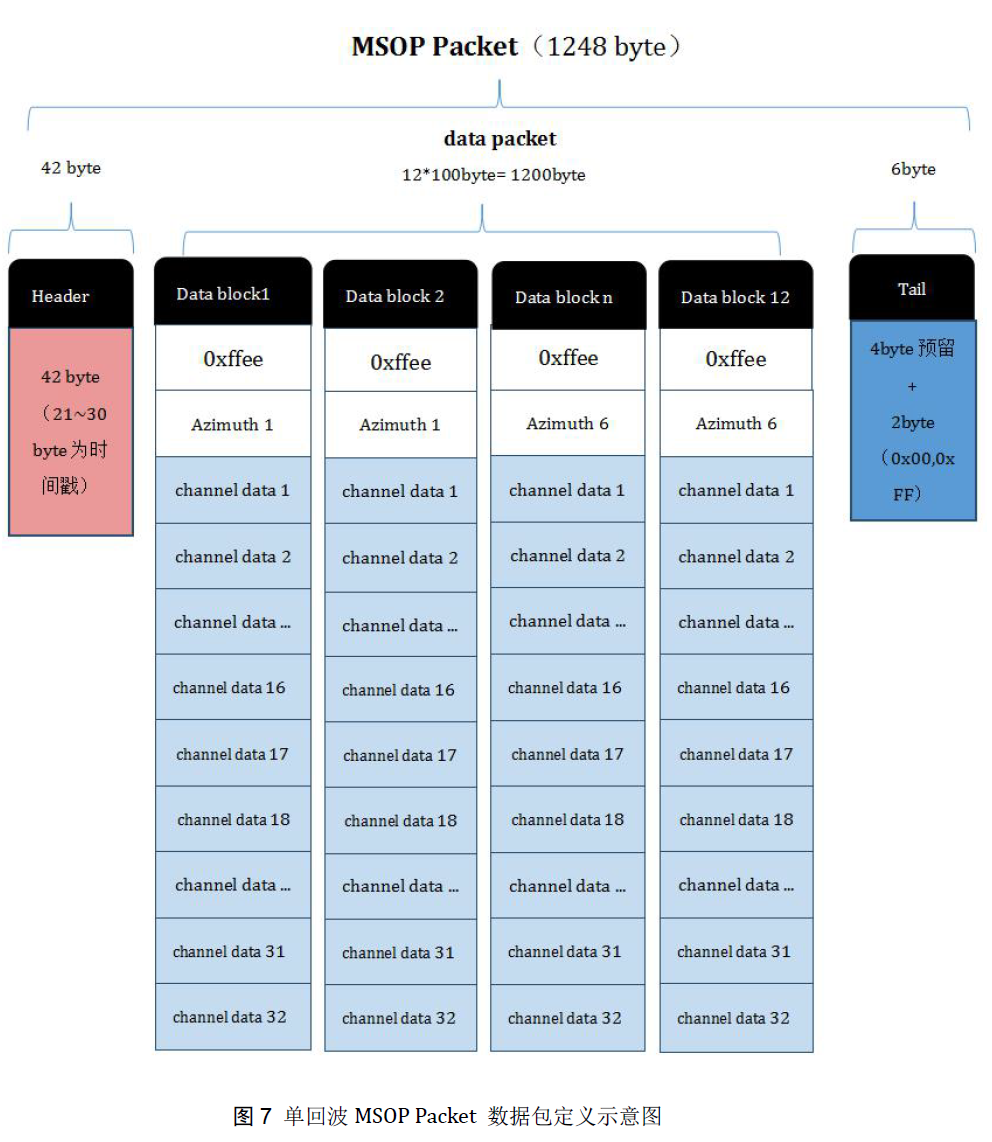
通信协议及packet信息
备注:
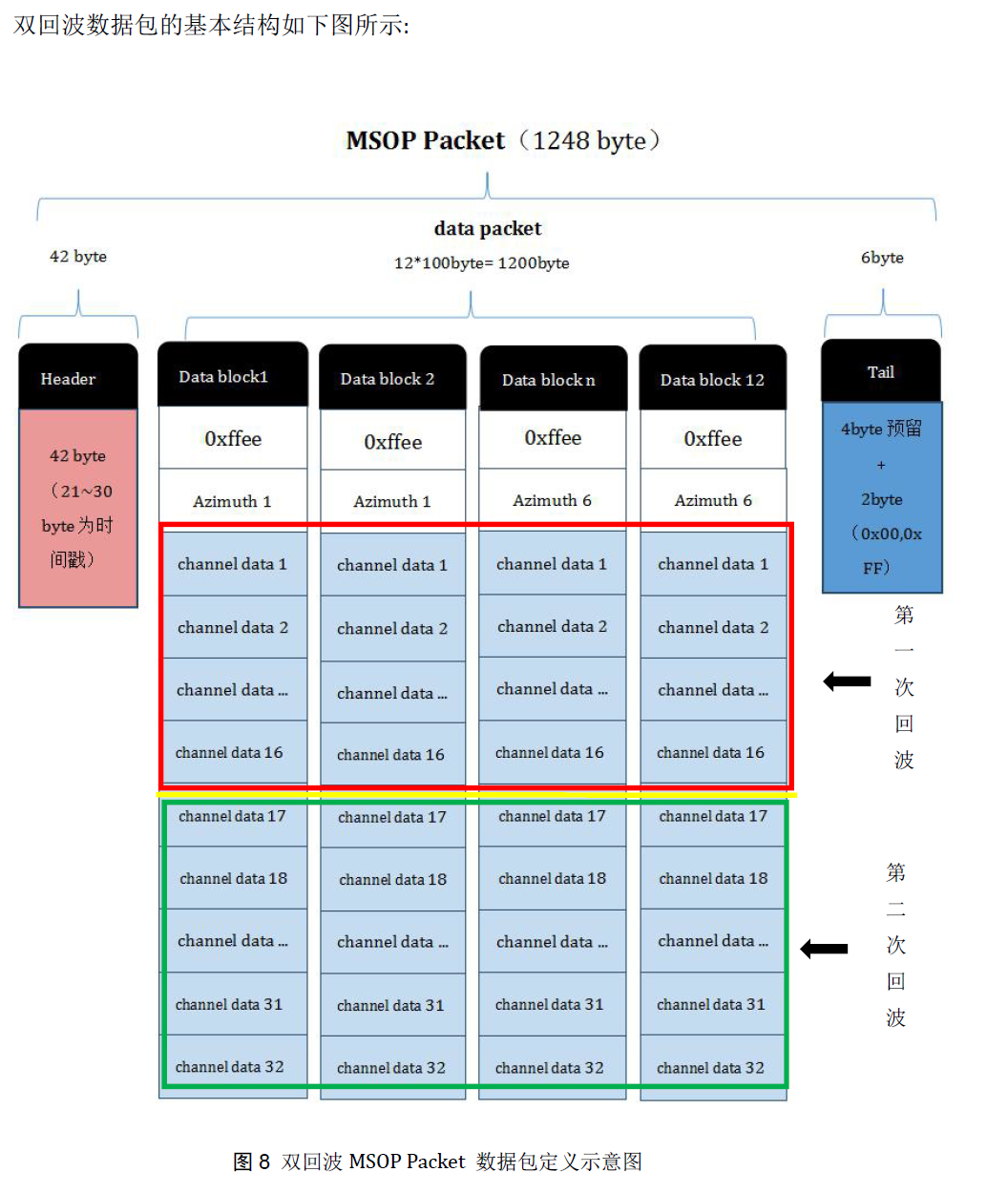
- 回波模式是什么?打出一束激光,可以回收单回波,也可以回收双回波。
- 为什么要双回波?因为激光束有面积,可能打在不同的物体上。
- 一般室外用激光雷达为了穿透雨雪雾尘,会使用多回波。而为了检测透明物体,会使用单回波(或第一回波)
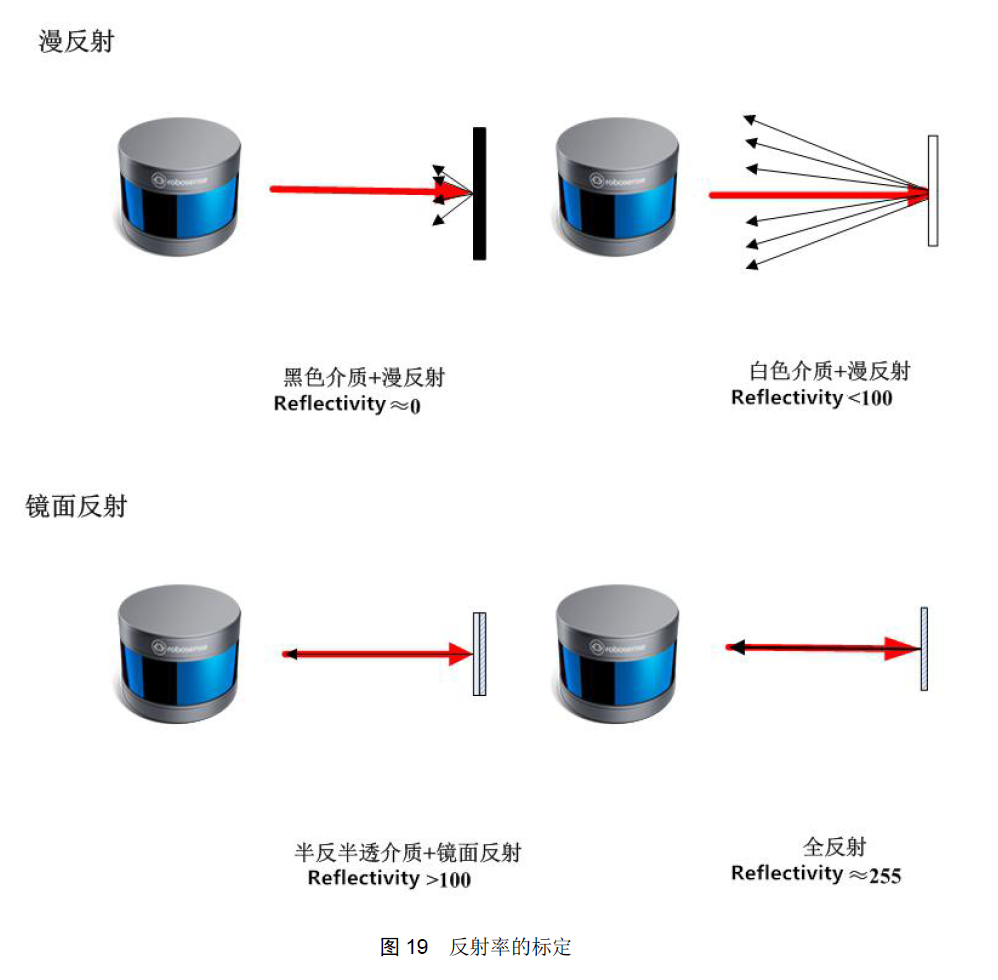
反射率信息
反射率是衡量一个物体对光反射能力的指标,与物体本身的材质有很大的关系。因此,可以用此信息区分不同材质的物体。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号